






とても大雑把に言えば,ヒューマノイドロボットとは,胴体から両手両脚とそれに頭の生えたロボットです. 工場で働くロボットアームをハコに4本くっつけ,先端を手や足に置き換え,カメラをつければ出来上がりです. 昨世紀末からメディアに登場したヒューマノイドロボットたちのほとんどは,それだけで説明できる構造になっています.しかし果たして本当にそうした作り方が,工学的にベストな解なのでしょうか?
2本の脚で大地に立ち,地面に力を作用させてその反作用で運動する...環境との頻繁な衝突・接触を伴う相互作用が運動の根本原理にあるヒューマノイドロボットの機構は,従来のロボットアームとは異なる独自の設計がなされて然るべきでしょう. 本プロジェクトの狙いは,いわばヒューマノイドロボットの運動性拡大のための進化的機構設計,そしてそれと対をなす制御方法を論じることです.

UT-θ
 |
|
|||||||||||||||||||
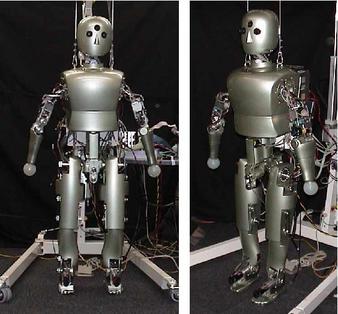
UT-θの外観を上図に示します. マグネシウム鋳造によって曲線的なフォルムの薄肉外骨格型構造とし, 高剛性を確保しつつ大幅な軽量化に成功しました. PISAバスを有したFA用CPUボードを中核に,集中型の構成とし, モータドライバにはTitech Version2およびTID(Titech Intelligent Driver)を併用, D/A変換,A/D変換,パルスカウンタは汎用I/OボードRitechによって行います. 頭部にはモノクロプログレッシブカメラ×2+カラーNTSCカメラ×1を装備し, モノクロ画像によるステレオ立体視と色認識が可能です. 画像処理にはIP5000(日立)を用いています. 肘部および足首には6軸力センサ(Nitta)を,体幹部には3軸加速度センサ+ジャイロセンサをそれぞれ塔載しています. OSにはRTLinuxを採用し,ハードリアルタイムなシステムとしています.
UT-θは次の特徴的な機構を持ちます.
UT-θ2
 |
|
|||||||||||||||||
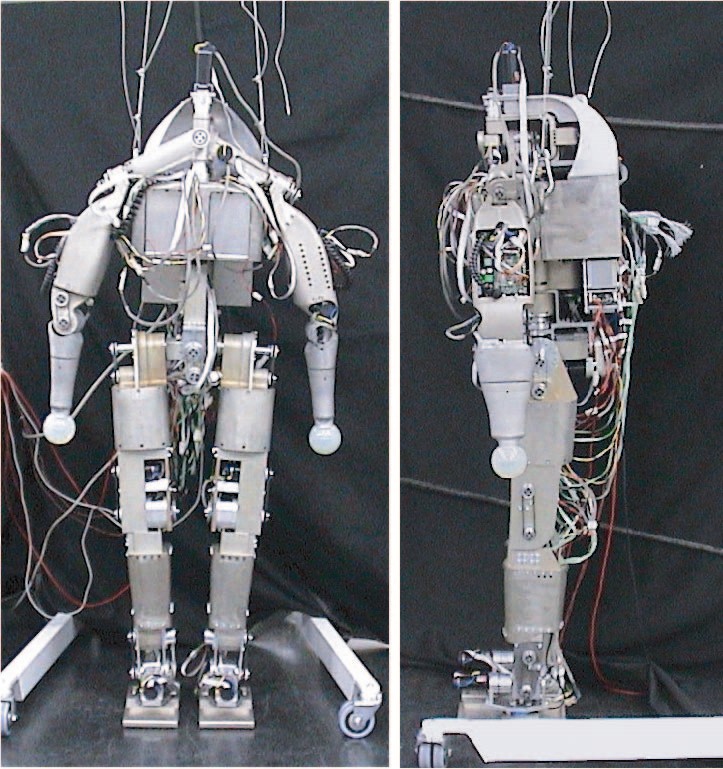
UT-θ2の外観を上図に示します. UT-θの基本設計を継承していますが, UT-θ と比べて,駆動系のパワーがさらに上がり, UT-θ2用に開発されたモータドライバ TMC1コントローラ/TMD1ドライバ(スリーテック)によって, 制御PCと1[ms]でシリアル通信を行い,D/A変換,A/D変換,パルスカウンタはドライバ側が独立して行い, 関節単位の制御性能も向上しています. また脚部や,腰のダブルスフェリカル・ジョイントの剛性を上げ,さらに頑丈な造りとなっています. UT-θ との最大の違いは肩関節にあります. 肩関節にダブルスフェリカル・ジョイントを搭載することで,大きな稼動領域を実現しました.
UT-θ2の特徴的な機構は次のようになります.
- 篠原徹也,伴茂樹,後藤達哉,稲邑哲也,岡田昌史,中村仁彦, 二重球面ジョイントを用いた股関節機構を持つヒューマノイドの開発, 第20回日本ロボット学会学術講演会, 1C16, 2002
- 岡田昌史,後藤達哉,中村仁彦, 歩行ロボットの従反力運動を実現する膝関節機構, 第20回日本ロボット学会学術講演会, 1C19, 2002
- シェバン ギヨム,中村仁彦, Making H-Anim Model for Kinematic and Dynamic Simulation of Humanoid Robot, 計測自動制御学会システムインテグレーション部門講演会予稿集, 2P13-05, 2002
- レックサクルチャイ ポンサック,岡田昌史,中村仁彦, Optimal filtering for humanoid robot state estimators, 計測自動制御学会システムインテグレーション部門講演会予稿集, 2P13-04, 2002
- 篠原徹也,岡田昌史,中村仁彦, 全身型ヒューマノイドに用いる股関節機構の開発, 計測自動制御学会システムインテグレーション部門講演会予稿集, 2P13-03, 2002
- 篠原徹也,樋原直之,岡田昌史,中村仁彦, ヒューマノイドロボットの運動性進化にむけての機構開発と運動制御, 日本機械学会ロボティクスメカトロニクス講演会'03, 2P1-3F-C3, 2003
- 神崎秀,中村仁彦,岡田昌史, バックラッシュクラッチをもつヒューマノイドの歩行制御, 日本機械学会ロボティクスメカトロニクス講演会'03, 2P1-3F-C2, 2003
- Lekskulchai Pongsak,岡田昌史,篠原徹也,中村仁彦, Attitude estimation by compensating gravity direction, 第21回日本ロボット学会学術講演会, 2A23, 2003
- 山本裕介,岡田昌史,中村仁彦, 二重球面ジョイントを用いたヒューマノイドの肩関節機構の開発, 第21回日本ロボット学会学術講演会, 2A25, 2003
- Penasse Vincent,中村仁彦, Dance motion synthesis with music synchronization, 第21回日本ロボット学会学術講演会, 2J28, 2003
- Masafumi Okada, Tetsuya Shinohara, Tatsuya Gotoh, Shigeki Ban, and Yoshihiko Nakamura, Double Spherical Joint and Backlash Clutch for Lower Limbs of Humanoids, Proceeding of IEEE International Conference on Robotics and Automation(ICRA2003), pp.491-496, Taipei, Taiwan, September, 2003
- M.Okada, T.Shinohara, T.Gotoh, S.Ban and Y.Nakamura, Humanoid Robot Mechanisms for Responsive Mobility, Proceedings of the 2nd International Symposium on Adaptive Motion of Animals and Machines, SaP-III-3, Kyoto, March, 2003
- 山本裕介, 中野道樹, 岡田昌史, 中村仁彦, 二重球面肩関節を持つヒューマノイドロボット, 第22回日本ロボット学会学術講演会, 1L27, 2004
- 中野道樹, 岡田昌史, 中村仁彦, ワイヤを用いたバックドライバブルな足首駆動機構の設計, 日本機械学会ロボティクス・メカトロニクス講演会'04, 2P2-L1-12, 2004
- Dirk Wollherr, Yoshihiko Nakamura, and Fabio Zonfrilli, Active-Passive Knee Control for the Humanoid UT-Theta, IEEE International Conference on Advanced Robotics, pp.692-697, Seattle, USA, July 18-20, 2005.
- Fabio Zonfrilli, Dirk Wollherr, and Yoshihiko Nakamura, Walking Control of the Humanoid UT-Theta, IEEE International Conference on Advanced Robotics, pp.698-704, Seattle, USA, July 18-20, 2005.
- 鮎澤光, 山本泰地, 中村仁彦, 受動関節の固有ダイナミクスを利用した二足歩行, 日本機械学会ロボティクス・メカトロニクス講演会'06, 2P1-B24, 2006
|
特許 |
|||
| 出願人 | : | 東京大学長 | |
| 発明者 | : | 中村仁彦, 岡田昌史, 後藤達哉 | |
| 名称 | : | バックラッシュクラッチおよびそれを具えたロボット用関節機構 | |
| 公開日 | : | 2003年8月19日 | |
| 公開番号 | : | 特開2003-231082 |
| 出願人 | : | 東京大学長 | |
| 発明者 | : | 中村仁彦, 岡田昌史, 篠原徹也 | |
| 名称 | : | 双腕ロボットの双腕肩関節機構および二足歩行ロボットの両足股関節機構 | |
| 公開日 | : | 2003年8月19日 | |
| 公開番号 | : | 特開2003-231081 |
岡田昌史,伴茂樹,篠原徹也,Vincent Penasse,Guillaume Chevant,
後藤達哉,樋原直之,Pongsak Lekskulchai,神崎秀,
山本裕介,中野道樹,Dirk Wollherr,Fabio Zonfrilli,
山本泰地,鮎澤光
(UT-θに関するご意見・ご質問は まで)
まで)
