






バックラッシュ・クラッチ
概要
球技などのスポーツにおいても「膝を旨く使って...」というのが一つのキーフレーズになっているように,脚を構成する関節の中でも特に膝は,運動性向上のための大きな役割を担っています.例えば高い段差を昇るときなどには非常に大きなトルクを発生し,足を地面に着くときには衝撃を和らげるクッションとして働き,遊脚として足を運ぶ間は振り子のように重力に任せて運動します.このような様々な膝の機能を実装するために開発されたのがバックラッシュ・クラッチです.
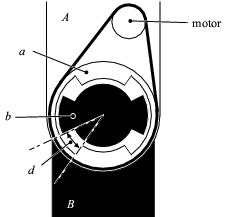
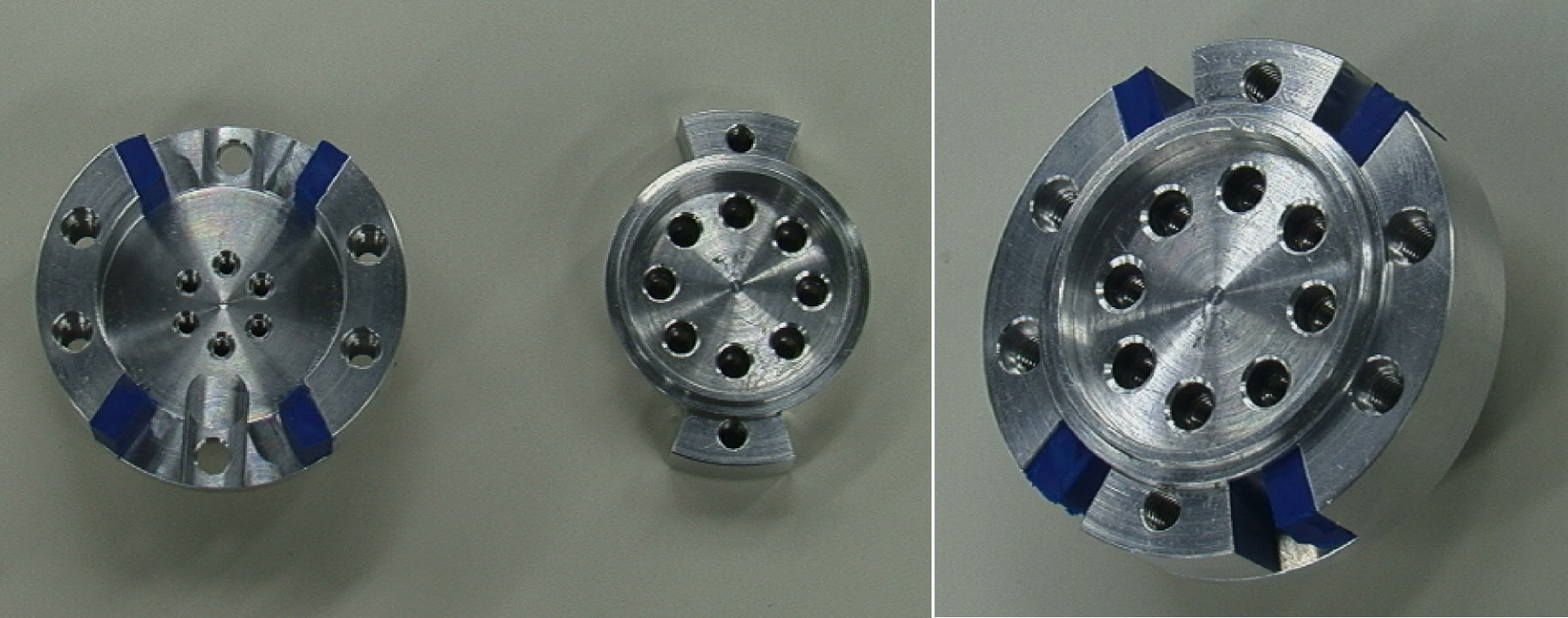
上図は,その仕組を模式的に示したものです.Aが大腿部,Bが下脛部であり,モータ出力は可動部(a部)にまず伝達され,次にBに固定されたb部へと接触によって伝達されることになりますが,a部とb部との間には大きなバックラッシュを設けてあります(d部).このdを,モータ出力と重力を用いて制御してやることで,余分なアクチュエータを付加することなくトルク伝達状態を切り換えるというのが,基本となるアイデアです.
|
|
|
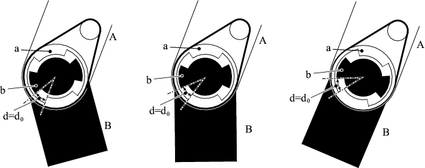
高トルク伝達状態 |
トルク非伝達状態 |
上左図のようにdをゼロにし,a部の片側をb部に押しあてれば,矢印の方向にトルクを伝達することができます.自重を支えたり,地面を蹴り出したりする際に用いるモードです.また上右図のようにdを一定値d0に保てば,a部とb部の間でトルクを絶縁することができます.重力を利用し,エネルギー効率がよく見た目にも滑らかな遊脚の運動を生み出す,あるいは,脚着床の瞬間に足先に発生する衝撃の大部分を膝でカットするためのモードです.
関連論文
- 岡田昌史,後藤達哉,中村仁彦, 歩行ロボットの従反力運動を実現する膝関節機構, 第20回日本ロボット学会学術講演会, 1C19, 2002
- 神崎秀,中村仁彦,岡田昌史, バックラッシュクラッチをもつヒューマノイドの歩行制御, 日本機械学会ロボティクスメカトロニクス講演会'03, 2P1-3F-C2, 2003
- Dirk Wollherr, Yoshihiko Nakamura, and Fabio Zonfrilli, Active-Passive Knee Control for the Humanoid UT-Theta, IEEE International Conference on Advanced Robotics, pp.692-697, Seattle, USA, July 18-20, 2005.
- Fabio Zonfrilli, Dirk Wollherr, and Yoshihiko Nakamura, Walking Control of the Humanoid UT-Theta, IEEE International Conference on Advanced Robotics, pp.698-704, Seattle, USA, July 18-20, 2005.
- 鮎澤光, 山本泰地, 中村仁彦, 受動関節の固有ダイナミクスを利用した二足歩行, 日本機械学会ロボティクス・メカトロニクス講演会'06, 2P1-B24, 2006
受賞・特許
|
特許 |
|||
| 出願人 | : | 東京大学長 | |
| 発明者 | : | 中村仁彦, 岡田昌史, 後藤達哉 | |
| 名称 | : | バックラッシュクラッチおよびそれを具えたロボット用関節機構 | |
| 公開日 | : | 2003年8月19日 | |
| 公開番号 | : | 特開2003-231082 |
