






サイバネティック・ショルダ
工場などで使われるロボットアームは,なるべく正確に手先の位置・姿勢を制御できることを意図した設計になっています. 例えば位置・姿勢の制御をそれぞれ根本に近い3軸と手首の3軸に陽に分離し,例えば3つの関節軸を一点で直交させることで逆運動学の解析的求解を容易にし,例えば高剛性な部材と高減速比を持つギアとでボディを構成し... これらは,工学的な立場から言えば全く正しい解と言えます.
しかし、ヒューマノイドロボットに関して言えば次のようなことを意識しなければなりません.
- 人に恐怖感を与える元となる機械的印象(硬い・冷たい・etc.)を排除する
- 衝突によって周囲の人や環境におよぼす危害をできるだけ低減する
どのようにすればこれらを満足する設計ができるのでしょうか.
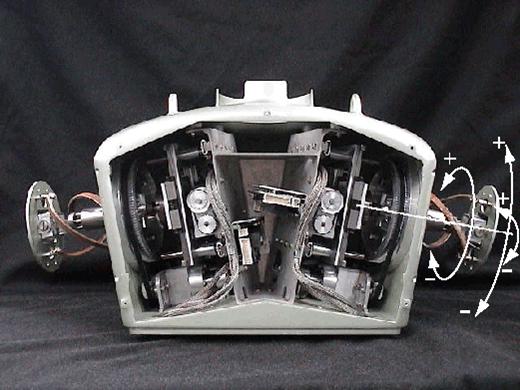
本プロジェクトでは,人間の肩関節に着目しました.肩の運動で最も特徴的なのは,動きとともに回転中心が移動するということで,これがいわゆる「人間らしい」しなやかな動きの源です.サイバネティック・ショルダは,並進2自由度と回転1自由度を持つ閉リンク機構によって,上体に固定されるリンク(下図リンクB)と腕が固定されるリンク(同リンクD)とのほぼ中間に常に回転中心を位置させることで,この特徴を模擬しています.見た目に親和性の高い人間的な肩の動きを,最少個数のモータで演出できるわけです.
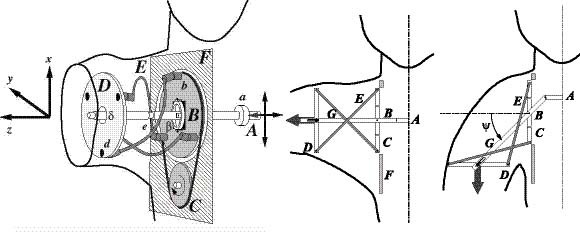
さらに,リンクBとリンクDを連結する3つのリンクEをあえて低剛性にすることで,ロボットに大きなパッシブコンプライアンスを備えさせ,障害物と衝突した際に生じる撃力を柔軟に吸収できるようにしています.
またリンクEに非線形ばね特性を持つ材料を用い,さらにリンクGにモータを追加して軸方向の引っ張り力を変化させることで,コンプライアンスを能動的に調整できる,プログラマブル・コンプライアンスと呼ばれるメカニズムを開発しました.これによって,ボールを投げるなどダイナミックな運動を行う際には柔く,お茶を運ぶなど正確さを要求する運動を行う際には硬くするなど,作業内容に応じて腕の運動の剛性を自由に変化させることができるようになります.
- Masafumi Okada and Yoshihiko Nakamura, Development of a Cybernetic Shoulder -A Three-DOF Mechanism That Imitates Biological Shoulder Motion-, IEEE Transactions on Robotics, vol. 21, no.3, pp.438-443, 2005
- Masafumi Okada, Shigeki Ban and Yoshihiko Nakamura, Skill of Compliance with Controlled Charging/Discharging of Kinetic Energy, Proceeding of IEEE International Conference on Robotics and Automation(ICRA2002), Vol.3, pp.2455-2460, Washington D.C., U.S.A., May, 2002
- 伴茂樹,岡田昌史,中村仁彦, エネルギーの蓄積・放出の制御による力学的技量の実現, 日本機械学会ロボティクス・メカトロニクス講演会'02(ROBOMEC'02), 2002
- 門根秀樹,岡田昌史,中村仁彦, 非線形力学系の同期を用いたロボットの運動制御, 日本機械学会ロボティクス・メカトロニクス講演会'02(ROBOMEC'02), 2002
- 岡田昌史,中村仁彦, 人間と共存するための肩機構 - 形態的親和性と受動的柔らかさ -, 日本ロボット学会誌, Vol.19, No.7, pp.818-821, 2001
- 岡田昌史,星野慎一郎,中村仁彦, 周波数特性の上限・下限を与えるハイブリッドコンプライアンスH∞設計法, 日本ロボット学会誌, Vol.19, No.8, pp.974-982, 2001
- Masafumi Okada, Yoshihiko Nakamura, Shigeki Ban, Design of Programmable Passive Compliance Shoulder Mechanism, ICRA'01(International Conference on Robotics and Automation), pp.348--353, 2001
- 伴茂樹,岡田昌史,中村仁彦, ヒューマノイドの力学的技量:エネルギの蓄積/放出の制御, 日本機械学会ロボティクス・メカトロニクス講演会'01(ROBOMEC'01), 2P1-G6, 2001
- 岡田昌史, 人間と環境の数理科学的記述と解析 ―ロボットの理解と人間の理解―, 第19回日本ロボット学会学術講演会, 2L12, 2001
- 伴茂樹,岡田昌史,中村仁彦, エネルギーの蓄積・開放を伴う力学的技量の実現, 第19回日本ロボット学会学術講演会, 3I25, 2001
- 岡田昌史,中村仁彦, サイバネティック・ショルダの開発―人間の肩の動きを模倣した3自由度機構―, 日本ロボット学会誌, Vol.18, No.5, pp.690-698, 2000
- M.Okada,Y.Nakamura and S.Hoshino, Design of Active/Passive Hybrid Compliance in the Frequency Domain, ICRA'00(International Conference on Robotics and Automation), pp.2250-2257, 2000
- 岡田昌史,中村仁彦, ヒューマノイドロボットの動きの親近性, 日本機械学会ロボティクス・メカトロニクス講演会'00(ROBOMEC'00), 2P2-79-104, 2000
- 岡田昌史,中村仁彦, プログラマブル・パッシブコンプライアンスを持つ肩機構 −ネオサイバネティックショルダの開発−, 第18回日本ロボット学会学術講演会, 2P17, 2000
- 岡田昌史,中村仁彦, 人間らしい動きを持つ肩機構, 第6回日本IFToMM会議シンポジウム前刷集, pp.9-13, 2000
- 岡田昌史, 人間らしい柔らかな動きと駆動機構, 日本ロボット学会誌, Vol.17, No.6, pp.783-765,1999
- M.Okada,Y.Nakamura and S.Hoshino, Development of the Cybernetic Shoulder --A Three DOF Mechanism that Imitates Biological Shoulder-Motion --, IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS'99), pp.543-548, 1999
- 星野慎一郎,岡田昌史,中村 仁彦, サイバネティック・ショルダのメカニカルソフトネスの実現, 日本機械学会ロボティクス・メカトロニクス講演会'99(ROBOMEC'99), 2P1-78-106, 1999
- 岡田昌史,中村仁彦, 人間らしい動き・柔らかさを持つトルソーロボット, 日本機械学会ロボティクス・メカトロニクス講演会'99(ROBOMEC'99), 2P1-78-107, 1999
- 岡田昌史,中村仁彦, ヒューマノイドコンプライアンスの周波数分離ハイブリッド設計, 第17回日本ロボット学会学術講演会, pp1203-1204, 1999
- Y.Nakamura,M.Okada and S.Hoshino, Development of the Torso Robot - Design of the New Shoulder Mechanism 'Cybernetic shoulder', Preprints of 6th International Symposium of Experimental Robotics, pp452-461, 1999
- 岡田昌史,中村 仁彦, サイバネティック・ショルダの設計と運動学的解析, 日本機械学会ロボティクス・メカトロニクス講演会'98(ROBOMEC'98), 1BI2-3, 1998
- M.Okada,Y.Nakamura and K.Yoshimoto, Development of Cybernetic Shoulder : A Three DOF Mechanism that Imitates Biological Shoulder-Motions, 2nd Japan-China Bilateral Symposium on Advanced Manufacturing Engineering, pp196-201, 1998
- 中村仁彦,岡田昌史,大沼 顕介, ソフトメカニズム -アクチュエータと機構設計-, 日本学術振興会未来開拓学術研究推進事業「マイクロメカトロニクス・ソフトメカニクス」公開シンポジウム, 1998
- 岡田昌史,中村仁彦, サイバネティック・ショルダ:動物の肩の動きを模倣する3自由度機構, 第15回日本ロボット学会学術講演会, 1997
