






|
|
|
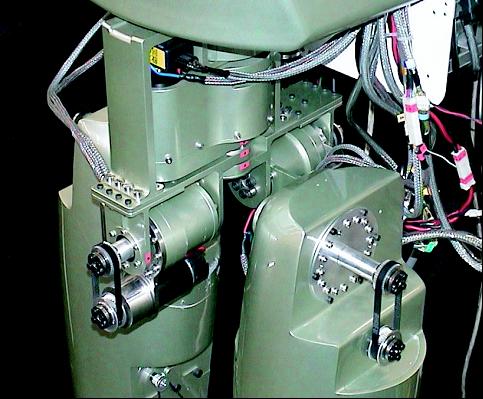
ダブルスフェリカル・ジョイント(股関節) |
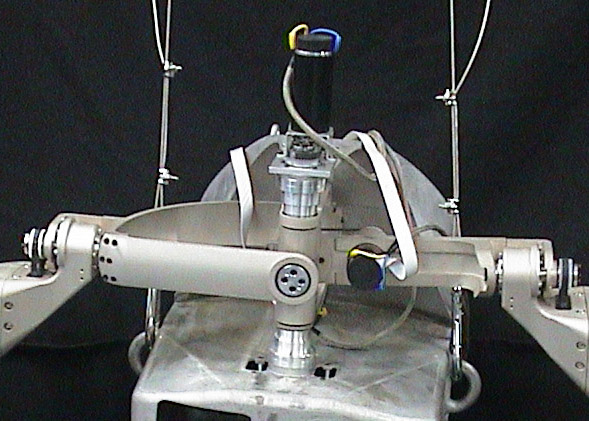
ダブルスフェリカル・ジョイント(肩関節) |
ダブルスフェリカル・ジョイントは文字通り,球面関節(直交3軸関節)を二つ組み合わせ,合計6軸が一点で交わるようにしたもので、下図のようになります.
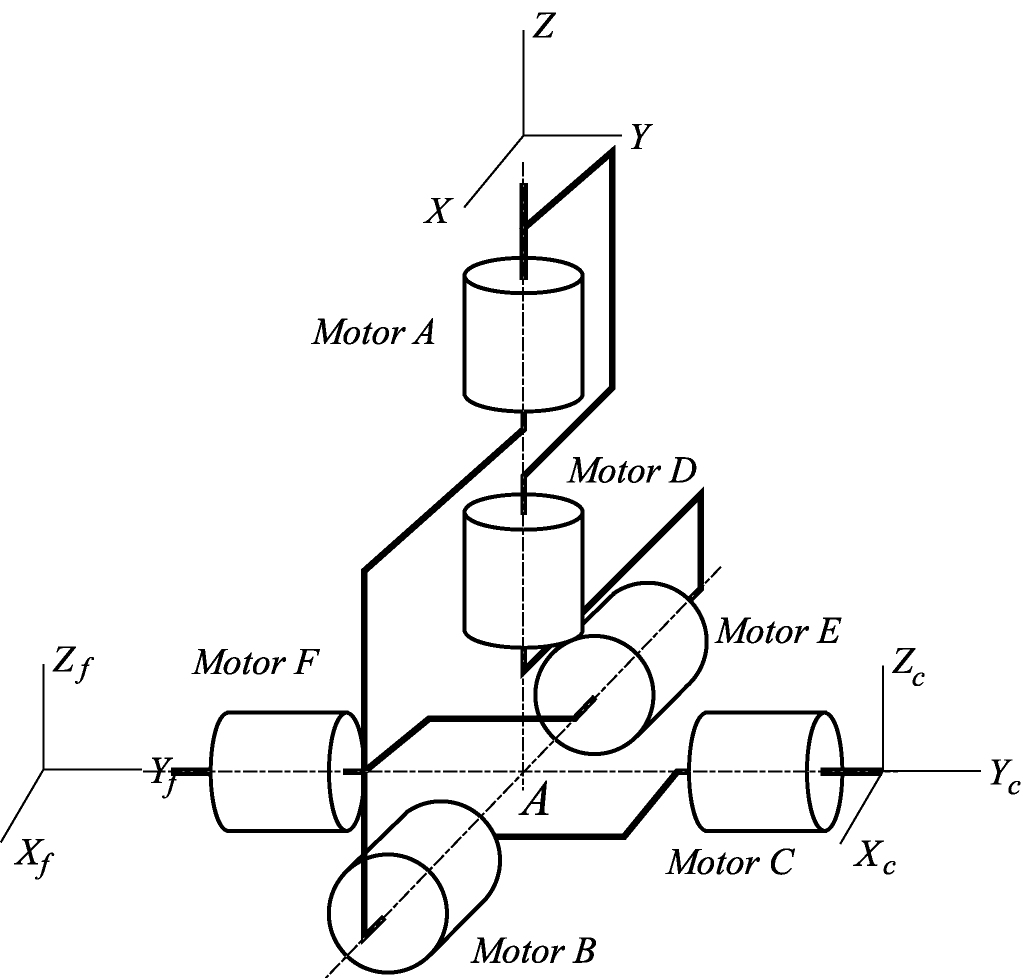
UT-θ では股関節に,UT-θ2 では股関節と肩関節に採用しています.
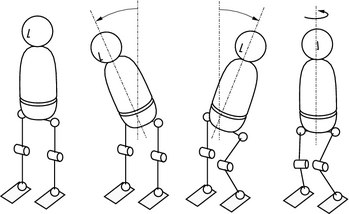
多くの二脚ロボットでは,脚は胴体下部に一定の幅を置いて取り付けられます.この場合,上体を左右に傾けたり捻ったりするためには,上図に示すように脚を複雑に動かす必要があります.腰関節を加えれば上体の姿勢制御を容易にすることもできるようになりますが,その場合,体内に塔載するモータや減速機構,アンプなどの数を増やさなければならず,サイズや重量の増加を招きます.
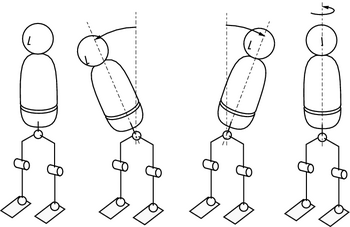
ダブルスフェリカル・ジョイントを用いて左右の股関節を一点に集めれば,上図のように,脚部を全く動かすことなく上体に様々な姿勢をとらせることが可能になります.つまり,新たに関節を増やすことなく,股関節のみで腰関節を代替できるということです.このように上体と脚部の動きを分離できることを利用し,運動中にバランスが崩れたときに上体だけを旨く使って安定化する制御法も,これまでに開発しています.
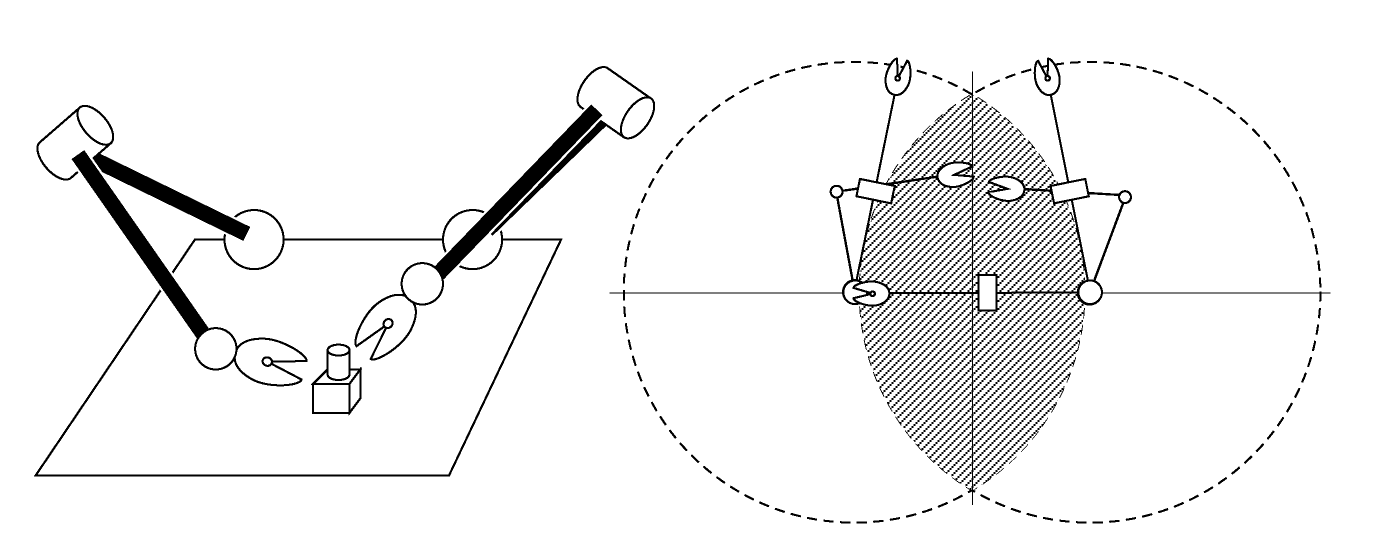
一方,多くのロボットの腕は,胴体上部に一定の幅を置いて取り付けられます. 両手で物を運ぶなど両腕を協調させて動かす作業をするためには,やはり両腕を複雑に動かす必要があります. さらに,両手先が稼動できる範囲は上図のようになり,作業スペースも限られます.
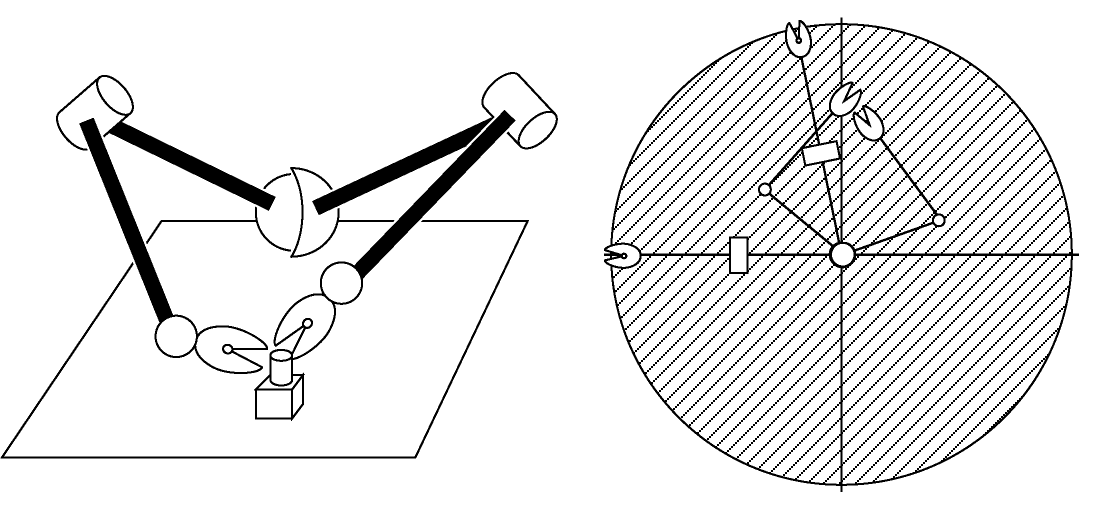
ダブルスフェリカル・ジョイントを用いて両腕の始点を一致させることで, 上手のようにロボットは両手先の位置を胴体まわりに自由に回転させることができるため, 新たに関節を追加することなく,大きな作業スペースを獲得できます.
- 篠原徹也,伴茂樹,後藤達哉,稲邑哲也,岡田昌史,中村仁彦, 二重球面ジョイントを用いた股関節機構を持つヒューマノイドの開発, 第20回日本ロボット学会学術講演会, 1C16, 2002
- 篠原徹也,岡田昌史,中村仁彦, 全身型ヒューマノイドに用いる股関節機構の開発, 計測自動制御学会システムインテグレーション部門講演会予稿集, 2P13-03, 2002
- 篠原徹也,樋原直之,岡田昌史,中村仁彦, ヒューマノイドロボットの運動性進化にむけての機構開発と運動制御, 日本機械学会ロボティクスメカトロニクス講演会'03, 2P1-3F-C3, 2003
- 山本裕介,岡田昌史,中村仁彦, 二重球面ジョイントを用いたヒューマノイドの肩関節機構の開発, 第21回日本ロボット学会学術講演会, 2A25, 2003
- 山本裕介, 中野道樹, 岡田昌史, 中村仁彦, 二重球面肩関節を持つヒューマノイドロボット, 第22回日本ロボット学会学術講演会, 1L27, 2004
| 出願人 | : | 東京大学長 | |
| 発明者 | : | 中村仁彦, 岡田昌史, 篠原徹也 | |
| 名称 | : | 双腕ロボットの双腕肩関節機構および二足歩行ロボットの両足股関節機構 | |
| 公開日 | : | 2003年8月19日 | |
| 公開番号 | : | 特開2003-231081 |
