









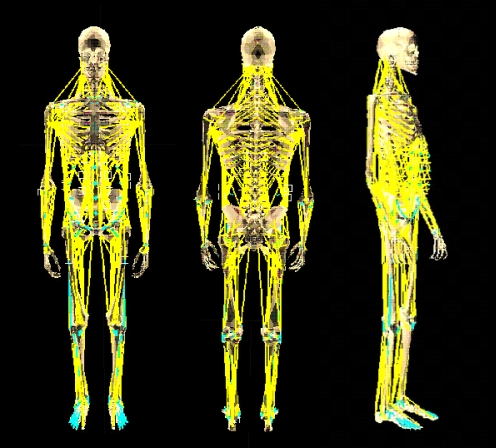
図1 ヒトの筋骨格モデル
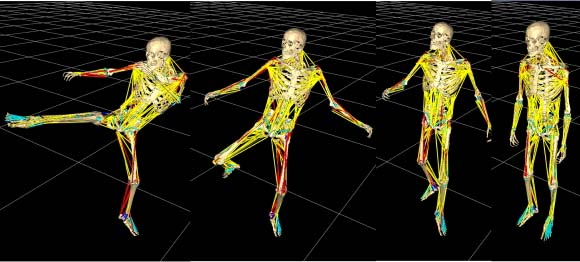
図2 逆動力学計算の結果
概要
本研究では,リンク系の動力学計算法を応用してヒトの体性感覚情報を推定することを目的としている.このため,図1のような筋骨格モデルを解剖学の教科書などをもとに構築し,線形計画法・二次計画法に基づく最適化計算によりキャプチャされた運動を実行するのに必要な筋張力を計算することができる.
計算例を図2に示す.筋張力が大きくなると色が黄色から赤色に変化する.

- Y. Nakamura, K. Yamane, I. Suzuki, and Y. Fujita: "Somatosensory Computation for Man-Machine Interface from Motion Capture Data and Musculoskeletal Human Model," IEEE Transactions on Robotics, 2004.
- Y. Nakamura, K. Yamane, I. Suzuki, and Y. Fujita: "Dynamic Computation of Musculo-Skeletal Human Model Based on Efficient Algorithm for Closed Kinematic Chains," Proceedings of the 2nd International Symposium on Adaptive Motion of Animals and Machines, Kyoto, Japan, SaP-I-2, March 2003.
- 大武,山根,中村: "袈裟斬り動作の体性感覚に基づく主観評価と運動計測に基づく客観評価," 21回日本ロボット学会学術講演会, 2J26, 2003.
- 藤田,中村,山根,鈴木: "筋骨格人体モデルにおける筋張力計算の数理計画問題," 日本機械学会ロボティクス・メカトロニクス講演会'03講演論文集, 2P2-3F-B7, 2003.
- 合志,中村,岡田: "低自由度ヒューマンフィギュアとの双方向変換を用いた大自由度人体筋骨格モデルの運動制御," 日本機械学会ロボティクス・メカトロニクス講演会'03講演論文集, 2P1-3F-C5, 2003.
- 鈴木,山根,多谷,栗原,中村: "高速動力学計算法を用いた詳細人体モデルに基づく人間の力学計算," 第20回日本ロボット学会学術講演会予稿集, 3C14, 2002.
受賞・特許
| ・受賞 | ||
| ― | 2003年度 日本ロボット学会 研究奨励賞 |
| ・特許 | |||
| 出願人 | : |
科学技術振興事業団 |
|
| 発明者 | : |
中村 仁彦,山根 克,鈴木 一郎 |
|
| 名称 | : | 身体力学計算方法,身体力学計算プログラム及びそれを記録した記録媒体,身体力学モデル及びそのモデルデータを記憶した記録媒体 | |
| 公開日 | : |
2003年12月2日 |
|
| 公開番号 | : | 特開2003-339673 |
| ・特許 | |||
| 出願人 | : | 科学技術振興事業団 | |
| 発明者 | : | 中村 仁彦,山根 克,多谷 浩嗣 | |
| 名称 | : | 身体モデル生成方法,身体モデル生成プログラム及びそれを記録した記録媒体,身体モデルデータを記録した記録媒体 | |
| 公開日 | : | 2004年1月15日 | |
| 公開番号 | : | 特開2004-13474 |
メンバー
山根 克,村井 昭彦,大武 美保子, 多谷 浩嗣
栗原 一貴 ,鈴木 一郎 ,合志 剣之助 ,藤田 悠介
 まで)
まで)