









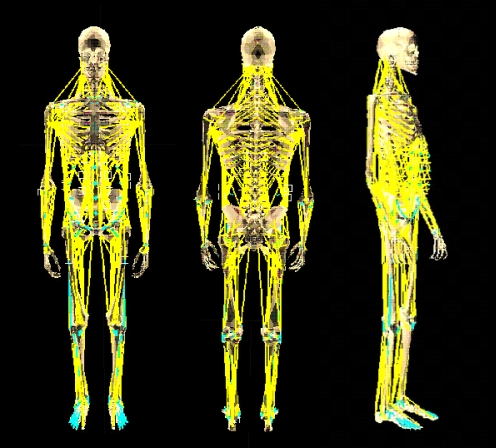
fig.1 Musculoskeletal Human Model
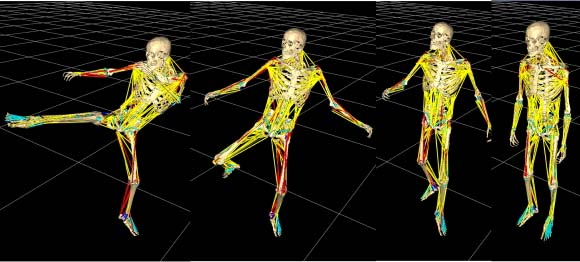
fig.2 Result of Inverse Dynamics
Outline
In this research, we try to estimate the somatosensory information of human during whole-body motions. We developed a detailed musculoskeletal human model shown in Figure 1 and applied the dynamics computation algorithms for kinematic chains. The muscle forces are computed by linear or quadratic programming.
Figure 2 illustrates a result of inverse dynamics computation, where the color of each muscle changes from yellow to red as the force increases.

- Y. Nakamura, K. Yamane, I. Suzuki, and Y. Fujita: "Somatosensory Computation for Man-Machine Interface from Motion Capture Data and Musculoskeletal Human Model," IEEE Transactions on Robotics, 2004.
- Y. Nakamura, K. Yamane, I. Suzuki, and Y. Fujita: "Dynamic Computation of Musculo-Skeletal Human Model Based on Efficient Algorithm for Closed Kinematic Chains," Proceedings of the 2nd International Symposium on Adaptive Motion of Animals and Machines, Kyoto, Japan, SaP-I-2, March 2003.
Awards, Patents
| Award | ||
| -- | Research Promotion Prize from the Robotics Society of Japan in 2003 |
Members
Katsu Yamane, Mihoko Otake, Akihiko Murai, Koji Tatani
Kazutaka Kurihara, Ichiro Suzuki, Kennosuke Goshi, Yusuke Fujita
 )
)