









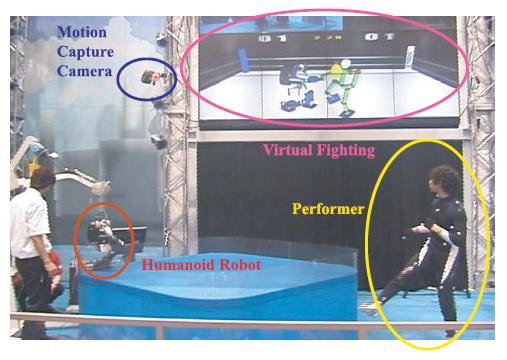
Fig.1 Virtual fighting between a human and a humanoid robot at EXPO2005
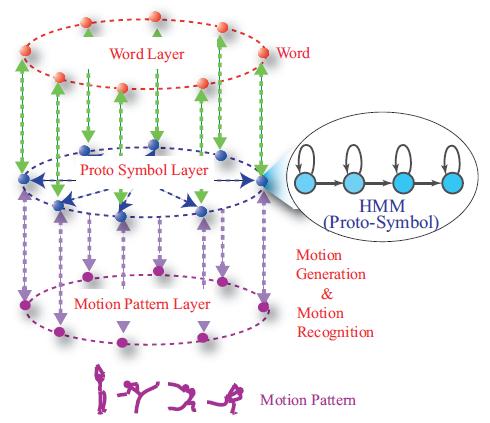
Fig.2 Motion database including captured data, HMMs, and word labels
概要
本研究では,運動パターンおよび動作を通じたインタラクションの記号処理に基づくロボットの身体的コミュニケーションの獲得を目指している.隠れマルコフモデル(Hidden Markov Model: HMM)により抽象化された運動パターン記号およびインタラクションパターン記号の階層的情報処理により,ロボットは自分がおかれている状況をインタラクション記号として認識し,現在の状況を持続するために行なうべき行動を運動パターン記号として推定することによって,人間の動きに合わせて振る舞うことが可能となる(図1:2005年愛知万博プロトタイプロボット展).
また,言語は高度な記号処理であり,上記の運動パターン記号から構成される知識に基づきより高次な記号推論を通じてロボットが言語を獲得することが期待される.これまでに,運動パターン記号と単語の関係をマッピングする確率的なモデル(図2)を提案し,単語から運動を連想することや運動を単語として解釈することが可能になりつつある.

- Wataru Takano, Katsu Yamane, Yosihiko Nakamura, "Capture Database through Symbolization, Recognition and Generation of Motion Patterns", IEEE International Conference on Robotics and Automation, pp. 3092-3097, 2007.
- Wataru Takano, Dana Kulic, Yosihiko Nakamura, "Interactive Topology Formation of Linguistic Space and Motion Space", IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 1416-1422, 2007.
- 高野渉,中村仁彦,“身体的相互作用を通じた主我・客我に基づくコミュニケーションの自律的獲得”,日本機械学会ロボティクス・メカトロニクス講演会'07講演論文集,2A1-O09,2007.
- 高野渉,ダナ・クーリッチ,中村仁彦,“インタラクションの推定・制御に基づく身体的コミュニケーション”,第25回日本ロボット学会学術講演会,1D12,2007.
- Wataru Takano, Katsu Yamane, Yoshihiko Nakamura, "Capture Database through Symbolization, Recognition and Generation of Motion Patterns", IEEE International Conference on Robotics and Automation, Rome, Italy, 2007 (to appear).
- Dana Kulic, Wataru Takano, Yosihiko Nakamura, "Incremental On-line Hierarchical Clustering of Whole Body Motion Patterns", IEEE International Symposium on Robot and Human Interactive Communication, pp. 1016-1021, 2007.
- Dana Kulic, Wataru Takano, Yosihiko Nakamura, "Representability of Human Motions by Factorial Hidden Markov Models", IEEE International Conference on Intelligent Robots and Systems, pp. 2388 - 2393, 2007.
- Dana Kulic, Wataru Takano, Yosihiko Nakamura, "Incremental Learning of Full Body Motions via Adaptive Factorial Hidden Markov Models", International Conference on Epigenetic Robotics, pp. 69-76, 2007.
- Dana Kulic, Wataru Takano, Yosihiko Nakamura, "Towards Lifelong Learning and Organization of Whole Body Motion Patterns", International Symposium of Robotics Research, pp. 113-124, 2007.
- 大川和宏,中村仁彦,“統計的モデルを用いた運動認識用階層構造の自動構築”,第12回ロボティクスシンポジア,pp.418-423,2007.
- Wataru Takano, Katsu Yamane, Tomomichi Sugihara, Kou Yamamoto, Yoshihiko Nakamura, "Primitive Communication Based on Motion Recognition and Generation with Hierarchical Mimesis Model", Proc. of the IEEE International Conference on Robotics and Automation, pp. 3602-3609, Orlando, Florida, 2006.
- Wataru Takano, Yoshihiko Nakamura, "Humanoid Robot's Autonomous Acquisition of Proto-Symbols through Motion Segmentation", IEEE-RAS International Conference on Humanoid Robotics, pp. 425-431, Genoa, Italy, 2006.
- 高野渉, 山根克,中村仁彦,“動作パターンの認識・生成に基づく人の行動データベースの設計”,日本機械学会ロボティクス・メカトロニクス講演会'06講演論文集,2A1-E35,2006.
- 高野渉, 山根克,中村仁彦,“ヒューマノイドロボットにおける人とインタラクションを通じたコミュニケーションモデルの獲得”,日本IFToMM会議シンポジウム前刷集,pp.51-54,2006.
- 高野渉,山根克,中村仁彦,“運動パターンの記号化と分類を用いた運動データベースの構築”,第24回日本ロボット学会学術講演会,1M12,2006.
- 高野渉,山根克,杉原知道,山本江,中村仁彦,“運動パターンの記号化に基づく原始的コミュニケーションモデルを用いた人間とロボットのインターラクティブコンテンツ”,第2回デジタルコンテンツシンポジウム,4-2,2006.
- 大川和宏,中村仁彦,“逐次更新される確率モデルによる分節指標とそれに基づく運動データのオンライン分節化”,第24回日本ロボット学会学術講演会,1M14,2006.
- 鈴木秀治,中村仁彦,“運動と感覚の統合情報に基づく行動モデリング”,日本機械学会ロボティクス・メカトロニクス講演会'06講演論文集,2A1-E31,2006.
- Wataru Takano, Hiroaki Tanie, and Yoshihiko Nakamura: "Key Feature Extraction for Probabilistic Categorization of Human Motion Patterns," IEEE International Conference on Advanced Robotics, pp.424-430, Seattle, USA, July 18-20, 2005.
- Wataru Takano, Katsu Yamane, Yoshihiko Nakamura: "Primitive Communication of Humanoid Robot with Human via Hierarchical Mimesis Model on the Proto Symbol Space," IEEE-RAS International Conference on Humanoid Robots, pp.167-174, Tsukuba, Japan, December 5-7, 2005.
- 高野渉,中村仁彦:“統計的相関に基づく動作パターンの分節化”,第19回人工知能学会全国大会,3F1-02,北九州,福岡,2005.6.15-17.
- 大川和宏,高野渉,中村仁彦:“統計的運動モデルの階層化と合成による動作認識”,日本機械学会ロボティクス・メカトロニクス講演会,1P1-S-009,神戸,兵庫,2005.6.9-11.
- 高野渉,山根克,中村仁彦:“運動の認識・生成に基づく原始的コミュニケーションの階層構造モデル”,第23回日本ロボット学会学術講演会,2H24,横浜,神奈川,2005.9.15-17.
受賞,特許
メンバー
高野渉,Dana KULIC,金澤稔,川辺直人,石川雄太郎,上段達弘
(ミメティックコミュニケーションに関するご意見・ご質問は まで)
まで)