









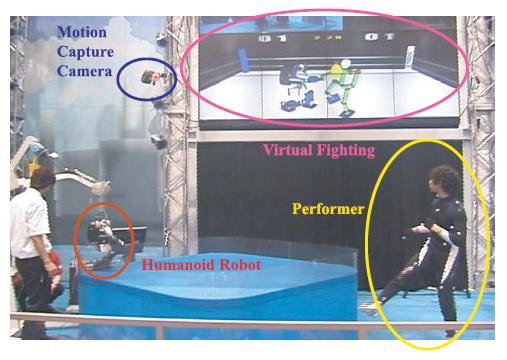
Fig.1 Virtual fighting between a human and a humanoid robot at EXPO2005
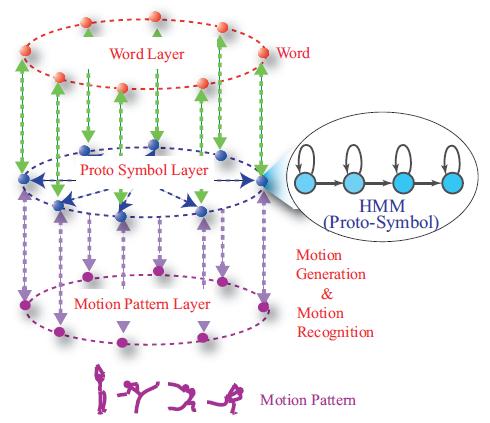
Fig.2 Motion database including captured data, HMMs, and word labels
We have modeled the primitive nonverbal communication between two persons by the mimetic communication model. This model consists of two groups of Hidden Markov Models (HMMs) hierarchically combined to recognize the motions of a human and to generate the corresponding interactive motions of a robot. HMMs in the lower layer abstract the motion patterns and those in the upper layer represent the interaction patterns. We call the former "Proto Symbols" and the latter "Meta Proto Symbols." Since this model includes Meta Proto Symbols, i.e., the representations of interaction patterns between a robot and a human, it enables the robot to estimate the current interaction and to respond socially to human behaviors. Fig. 1 shows the demonstration of our system at EXPO 2005.
In addition, we are investigating the acquisition of language based on motion-pattern symbols because both motion and language are a type of linguistic processing. So far, we have proposed a method to build a stochastic model mapping the relationship between Proto Symbols and words. Fig.2 shows the overview of this study. Each Proto Symbol abstracts several motion patterns, while the word labels are given to the motion data manually. By establishing the connection between motions and a language, we would like to make the robot understand natural language and behave as described by that language.

- Wataru Takano, Katsu Yamane, Yosihiko Nakamura, "Capture Database through Symbolization, Recognition and Generation of Motion Patterns", IEEE International Conference on Robotics and Automation, pp. 3092-3097, 2007.
- Wataru Takano, Dana Kulic, Yosihiko Nakamura, "Interactive Topology Formation of Linguistic Space and Motion Space", IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 1416-1422, 2007.
- Wataru Takano, Yosihiko Nakamura, "Autonomous Development of Embodied Communication based on Subjective-self Awareness and Objective-self Awareness through Physical Interaction", Robomec'07, 2A1-O09, 2007.
- Wataru Takano, Dana Kulic, Yosihiko Nakamura, "Embodied Communication based on Identification and Control of Physical Interaction", The 25th Annual Conference of the Robotics Society of Japan, 1D12, 2007.
- Wataru Takano, Katsu Yamane, Yoshihiko Nakamura, "Capture Database through Symbolization, Recognition and Generation of Motion Patterns", IEEE International Conference on Robotics and Automation, Rome, Italy, 2007 (to appear).
- Dana Kulic, Wataru Takano, Yosihiko Nakamura, "Incremental On-line Hierarchical Clustering of Whole Body Motion Patterns", IEEE International Symposium on Robot and Human Interactive Communication, pp. 1016-1021, 2007.
- Dana Kulic, Wataru Takano, Yosihiko Nakamura, "Representability of Human Motions by Factorial Hidden Markov Models", IEEE International Conference on Intelligent Robots and Systems, pp. 2388 - 2393, 2007.
- Dana Kulic, Wataru Takano, Yosihiko Nakamura, "Incremental Learning of Full Body Motions via Adaptive Factorial Hidden Markov Models", International Conference on Epigenetic Robotics, pp. 69-76, 2007.
- Dana Kulic, Wataru Takano, Yosihiko Nakamura, "Towards Lifelong Learning and Organization of Whole Body Motion Patterns", International Symposium of Robotics Research, pp. 113-124, 2007.
- OHKAWA Kazuhiro, NAKAMURA Yoshihiko, "Auto-Construction of Hierarchical Structure for Motion Recognition using Stochastic Model" (in Japanese), The 12th Robotics Symposia, pp. 418-423, 2007.
- Wataru Takano, Katsu Yamane, Tomomichi Sugihara, Kou Yamamoto, Yoshihiko Nakamura, "Primitive Communication Based on Motion Recognition and Generation with Hierarchical Mimesis Model", Proc. of the IEEE International Conference on Robotics and Automation, pp. 3602-3609, Orlando, Florida, 2006.
- Wataru Takano, Yoshihiko Nakamura, "Humanoid Robot's Autonomous Acquisition of Proto-Symbols through Motion Segmentation", IEEE-RAS International Conference on Humanoid Robotics, pp. 425-431, Genoa, Italy, 2006.
- Wataru TAKANO, Katsu YAMANE and Yoshihiko NAKAMURA, "Human Motion Database by Motion Pattern Recognition and Generation" (in Japanese), Robomec'06, 2A1-E35, 2006.
- Wataru TAKANO, Katsu YAMANE and Yoshihiko NAKAMURA, "Communication Acquisition of Humanoid Robot through Interaction with Its Partner" (in Japanese), The 12th Jc-IFToMM Symposium, pp. 51-54, 2006.
- Wataru Takano, Katsu Yamane, Yoshihiko Nakamura, "Motion Database based on Symbolization and Categorization of Motion Patterns" (in Japanese), The 24th Annual Conference of the Robotics Society of Japan, 1M12, 2006.
- Wataru TAKANO, Katsu YAMANE, Tomomichi SUGIHARA, Kou YAMAMOTO and Yoshihiko NAKAMURA, "Interactive Contents between a Human and a Robot Using Primitive Communication Model Based on Symbolizing Motion Patterns" (in Japanese), The 2nd Digital Content Symposium, 4-2, 2006.
- OHKAWA Kazuhiro, NAKAMURA Yoshihiko, "Motion Segmentation by Sequentially Updated Stochastic Model" (in Japanese), The 24th Annual Conference of the Robotics Society of Japan, 1M14, 2006.
- Hideharu SUZUKI and Yoshihiko NAKAMURA, "Behavior modeling based on multimodal information from motion and perception" (in Japanese), Robomec'06, 2A1-E31, 2006.
- Wataru Takano, Hiroaki Tanie, and Yoshihiko Nakamura: "Key Feature Extraction for Probabilistic Categorization of Human Motion Patterns," IEEE International Conference on Advanced Robotics, pp.424-430, Seattle, USA, July 18-20, 2005.
- Wataru Takano, Katsu Yamane, Yoshihiko Nakamura: "Primitive Communication of Humanoid Robot with Human via Hierarchical Mimesis Model on the Proto Symbol Space," IEEE-RAS International Conference on Humanoid Robots, pp.167-174, Tsukuba, Japan, December 5-7, 2005.
- Wataru Takano, Yoshihiko Nakamura: "Segmentaion of human behavior patterns based on the probabilistic correlation," (in Japanese) The 19th Annual Conference of the Japanese Society for Artificial Intelligence, 3F1-02, Kitakyushu, Fukuoka, 2005.6.15-17.
- Wataru TAKANO, Katsu YAMANE, Yoshihiko NAKAMURA: "Hierarchical Model for Primitive Communication Based on Motion Recognition and Generation," (in Japanese) The 23rd Annual Conference of the Robotics Society of Japan, 2H24, Yokohama, Kanagawa, 2005.9.15-17.
- Kazuhiro OHKAWA, Wataru TAKANO, Yoshihiko NAKAMURA:"Motion Recognition by Hierarchization and Combination of Statistical Motion Models," (in Japanese) ROBOMEC'05, 1P1-S-009, Kobe, Hyogo, 2005.6.9-11.
Wataru TAKANO, Dana KULIC, Minoru KANAZAWA, Naoto KAWABE, Youtaroh ISHIKAWA, Tatsuhiro JORDAN
(Your opinions and questions about Motion Generation Considering Physical Consistency are welcome.E-mail at )
)