









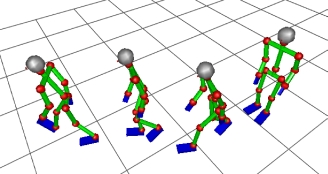
図1 歩行運動の生成例
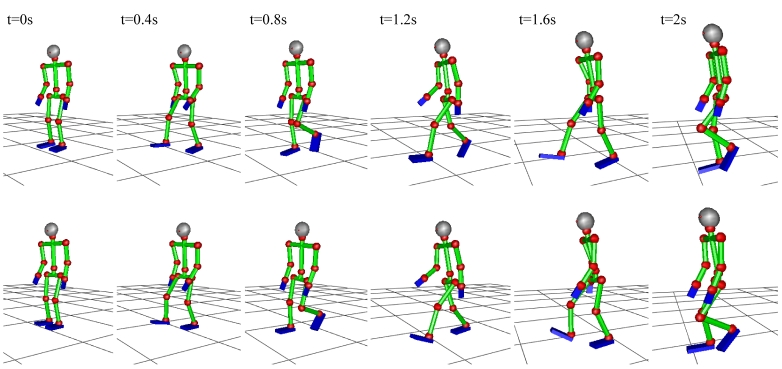
図2 モーションキャプチャデータと生成された運動の比較
概要
モーションキャプチャなどにより得られた運動データをヒューマノイドに適用すると,被験者とのダイナミクスの違いにより同様の運動が可能であるとは限らない.ある運動がある力学パラメータを持ったロボットにおいて力学的に実現可能であることを本研究では力学的整合性と呼び,力学的整合性を満たす運動を生成する方法を開発している.
図1はこのようにして生成された歩行運動の例である.また,もとのモーションキャプチャデータと生成された運動の比較を図2に示す.

- K. Yamane and Y. Nakamura: "Dynamics Filter - Concept and Implementation of On-line Motion Generator for Human Figures," IEEE Transactions on Robotics and Automation, vol.19, no.3, pp.421-432, 2003.
- 丹下,山根,中村: "逆動力学計算を用いた力学的整合性を満たすヒューマノイド動作の振付け," 日本機械学会ロボティクス・メカトロニクス講演会'02講演論文集, 2P1-K10, 2002.
- 山根,中村: "操作空間慣性逆行列を用いた力学的整合性を満たすヒューマノイド動作の振付け," 日本機械学会ロボティクス・メカトロニクス講演会'02講演論文集, 2P1-K12, 2002.
- K. Yamane and Y. Nakamura: "Dynamics Filter - Concept and Implementation of On-Line Motion Generator for Human Figures," Proceedings of IEEE International Conference on Robotics and Automation, pp.688-695, San Francisco, CA, April 2000.
- K. Yamane and Y. Nakamura: "Dynamics Filter: Towards Real-Time and Interactive Motion Generator for Human Figures," Proceedings of Workshop on Interactive Robotics and Entertainment, pp.27-34, Pittsburgh, PA, April 2000.
- Y. Nakamura and K. Yamane: "Real-Time Interactive Motion Generator of Human Figures," Proceedings of International Symposium on Adaptive Motion of Animals and Machines, E-21, Montreal, Canada, August 2000.
- K. Yamane and Y. Nakamura: "Interactive Motion Generation of Humanoid Robots via Dynamics Filter," Proceedings of First RAS/RSJ Workshop on Humanoid Robots, 54, Boston, MA, September 2000.
- 山根,中村: "力学フィルタによるヒューマンフィギュアのインタラクティブな動作生成," 日本機械学会ロボティクス・メカトロニクス講演会'00講演論文集, 2P2-74-094, 2000.
- 古本,山根,中村: "人間の力学特性を考慮したヒューマンフィギュアのインタラクティブな動作生成," 日本機械学会ロボティクス・メカトロニクス講演会'00講演論文集, 2P2-74-095, 2000.
受賞・特許
| ・受賞 | ||
| ― | 2000年度 日本ロボット学会 研究奨励賞 | |
| ― | 2003年度 日本機械学会ロボティクス・メカトロニクス部門ロボメック表彰 |
| ・特許 | |||
| 出願人 | : | 東京大学長 | |
| 発明者 | : | 中村 仁彦,山根 克,丹下 学 | |
| 名称 | : | 人型リンク系の運動生成方法 | |
| 公開日 | : | 2003年8月19日 | |
| 公開番号 | : | 特開2003-231077 |
メンバー
山根 克 , 丹下 学 , 古本 勇記
(力学的整合性を考慮した運動生成に関するご意見・ご質問は まで)
まで)