









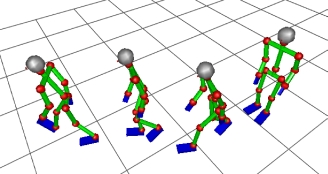
Fig.1 Generated Walk Motion
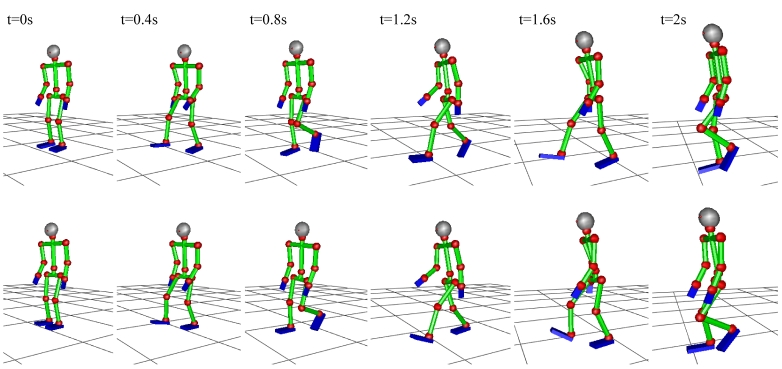
Fig.2 Comparison between Motion Capture Data and Generated Motion
Outline
Applying motion data obtained from motion capture, for example, to a humanoid robot does not result in similar motion because of the mismatch of dynamic property between the robot and the subject. Physical consistency represents the condition that a motion is physically feasible for a robot. The goal of this research is to develop a method for generating physically consistent motion patterns.
Figure 1 shows a walk motion generated by our method. We compare the original motion capture data and the generated motion in Figure 2.

- K. Yamane and Y. Nakamura: "Dynamics Filter - Concept and Implementation of On-line Motion Generator for Human Figures," IEEE Transactions on Robotics and Automation, vol.19, no.3, pp.421-432, 2003.
- K. Yamane and Y. Nakamura: "Dynamics Filter - Concept and Implementation of On-Line Motion Generator for Human Figures," Proceedings of IEEE International Conference on Robotics and Automation, pp.688-695, San Francisco, CA, April 2000.
- K. Yamane and Y. Nakamura: "Dynamics Filter: Towards Real-Time and Interactive Motion Generator for Human Figures," Proceedings of Workshop on Interactive Robotics and Entertainment, pp.27-34, Pittsburgh, PA, April 2000.
- Y. Nakamura and K. Yamane: "Real-Time Interactive Motion Generator of Human Figures," Proceedings of International Symposium on Adaptive Motion of Animals and Machines, E-21, Montreal, Canada, August 2000.
- K. Yamane and Y. Nakamura: "Interactive Motion Generation of Humanoid Robots via Dynamics Filter," Proceedings of First RAS/RSJ Workshop on Humanoid Robots, 54, Boston, MA, September 2000.
Awards, Patents
|
Members
DongHeui Lee, Hirotoshi Kunori
(Your opinions and questions about Motion Generation Considering Physical Consistency are welcome.E-mail at )
)
