









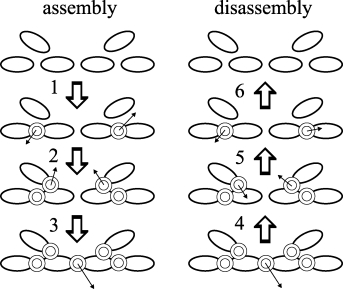
図1 O(N)順動力学計算法の概要

図2 並列処理のためのスケジューリングの例
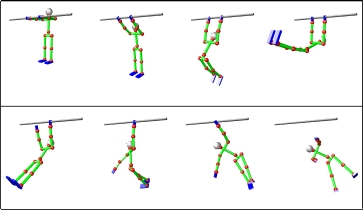
図3 ヒューマンフィギュアのシミュレーション例
概要
本研究では,任意の閉リンク機構にも適用可能で,開リンク機構に対する計算時間がリンク数に比例する順動力学計算アルゴリズムを開発した.さらに,O(N)個のプロセスを使って並列計算を行うことで,計算時間はO(logN)となる.
計算法の概要を図1に示す.以下の2つの手順からなる.
- 関節がなく各リンクが独立している状態から関節を1つずつ追加していき,その関節で必要な拘束力を計算する.この段階で計算された拘束力はすべての関節の影響を考慮していないことに注意する.
- 1.とは逆の順番で関節を切断していき,最終的な拘束力を計算する.また,この段階で関節加速度が計算される.
以上の手順において,関節を追加する計算が独立な場合には並列処理が可能である.また,関節を追加する順序を変えることにより並列性と総計算量が変化する.8リンクのシリアル機構を考えると,例えば図2に示すような順序が考えられる.図2左では最大2つ,図2右では最大4つのプロセスによる並列計算が可能であるため,4つのプロセッサがあるときには図2右の方が効率がよい.しかし,プロセッサが2つ以下しか使えない場合には総計算量の少ない図2左の方が有利である.
表1に8〜32個のリンクからなるリンク機構の順動力学計算を1〜8個のプロセスで処理した場合の計算時間を示す.
また,図3に構造可変ヒューマンフィギュアのシミュレーション例を示す.
この計算法はヒューマノイドシミュレータOpenHRPに実装されている.
| プロセス数 | |||||
| 1 | 2 | 4 | 8 | ||
| リンク数 | 8 | 1.31 | 0.98 | 0.90 | - |
| 16 | 2.75 | 1.87 | 1.70 | 1.57 | |
| 32 | 6.08 | 3.93 | 3.34 | 2.90 | |

- 山根,中村: "O(N)順動力学計算法と陰積分による衝突・接触の高速シミュレーション," 日本機械学会ロボティクス・メカトロニクス講演会'02講演論文集, 2P2-L09, 2002.
- K. Yamane and Y. Nakamura: "Efficient Parallel Dynamics Computation of Human Figures,'' Proceedings of International Conference on Robotics and Automation, pp.530-537, Washington DC, May 2002.
- F. Kanehiro, K. Fujiwara, S. Kajita, K. Yokoi, K. Kaneko, H. Hirukara, Y. Nakamura, and K. Yamane: "Open Architecture Humanoid Robotics Platform," Proceedings of International Conference on Robotics and Automation, pp.24-30, Washington DC, May 2002.
- K. Yamane and Y. Nakamura: "O(N) Forward Dynamics Computation of Open Kinematic Chains Based on the Principle of Virtual Work," Proceedings of IEEE International Conference on Robotics and Automation, pp.2824-2831, 2001.
- 山根,中村: "仮想仕事の原理に基づく並列O(logN)順動力学計算法," 日本機械学会ロボティクス・メカトロニクス講演会'01, 2P2-H4, 2001.
- 山根,中村: "O(logN)並列順動力学計算法とそのヒューマノイドシミュレータへの応用," 第19回日本ロボット学会学術講演会予稿集, pp.1-2, 2001.
- Y. Nakamura and K. Yamane: "Dynamics Computation of Structure-Varying Kinematic Chains and Its Application to Human Figures," IEEE Transactions on Robotics and Automation, vol.16, no.2, pp.124-134, 2000.
- 山根,中村: "仮想仕事の原理を用いた並列化可能な高速順動力学計算法," 第18回日本ロボット学会学術講演会予稿集, pp.1137-1138, 2000.
- K. Yamane and Y. Nakamura: "Dynamics Computation of Structure-Varying Kinematic Chains for Motion Synthesis of Humanoid," in Proceedings of IEEE International Conference on Robotics and Automation, pp.714-721, Detroit, U.S.A., May 1999.
- K. Yamane and Y. Nakamura: "Dynamics Computation of Closed Kinematic Chains for Motion Synthesis of Human Figures," Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.1108-1114, 1999.
- 中村,山根,永嶋: "構造変化を伴うリンク系の動力学計算法とヒューマンフィギュアの運動計算, "日本ロボット学会誌, vol.16, no.8, pp.124-131,1998.
受賞・特許
| ・特許 | |||
| 出願人 | : | 東京大学長 | |
| 発明者 | : | 中村 仁彦,山根 克 | |
| 名称 | : | リンク系動力学高速計算法 | |
| 公開日 | : | 2003年2月13日 | |
| 公開番号 | : | 特開2003-39356 |
| ・受賞 | ||
| ― | 2000年度 日本ロボット学会誌 論文賞 | |
| ― | 2001 IEEE Robotics and Automation Society King-Sun Fu | |
| Memorial Best Transactions Paper Award |
メンバー
山根 克
(構造可変リンク系の高速順動力学計算法に関するご意見・ご質問は まで)
まで)