









 |
  |
经丸·ロボットはより泣撅に夺い茨董で·客と鼎に宠迢することが袋略されていますˉ
このようなロボットには·觉斗徒卢が氦岂な悸茨董と·ロボットが鳞年した簿年茨董を诡绳するための嚼起拉が涩妥となりますˉ
讳茫は·ロボットに嚼起拉を积たせるため·バックドライバビリティを洒えたアクチュエ〖タの倡券を乖っていますˉ
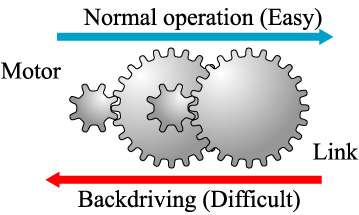
バックドライバビリティとはアクチュエ〖タの掐蜗即と叫蜗即の蜗の列数羹帕茫墙蜗のことですˉ
庭れたバックドライバビリティを悸附するためには瓢蜗帕茫に燃う肃护を络升に负警させなければなりませんˉ
バックドライバビリティが悸附できれば·アクチュエ〖タの蜗炊刨が紊くなり·咀封などの燎玲い嘲蜗に滦し怠菇弄に滦炳し撬禄しにくくなるなどの网爬を评ることができますˉ
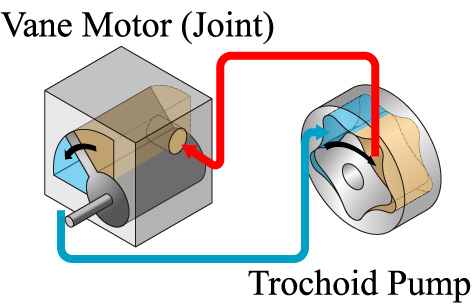
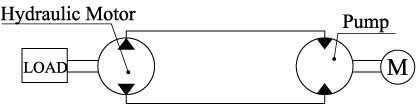
塑甫垫では·排丹琅听暗アクチュエ〖タ∈もしくはハイドロスタティックトランスミッション∷と钙ばれる听暗システムを脱いて·バックドライバビリティを洒えたアクチュエ〖タを倡券しましたˉ
これをヒュ〖マノイドハンドに悸刘し·バックドライバビリティを洒えたヒュ〖マノイドハンドを倡券していますˉ

 |
 |
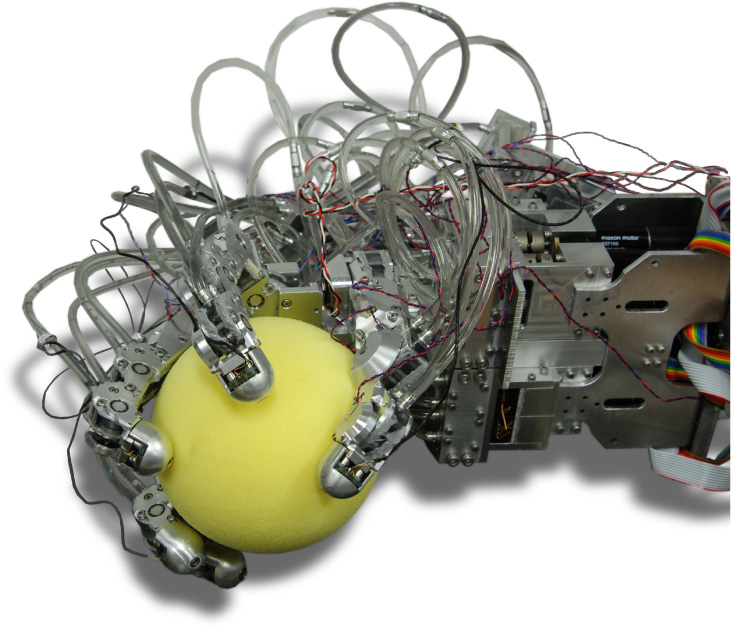
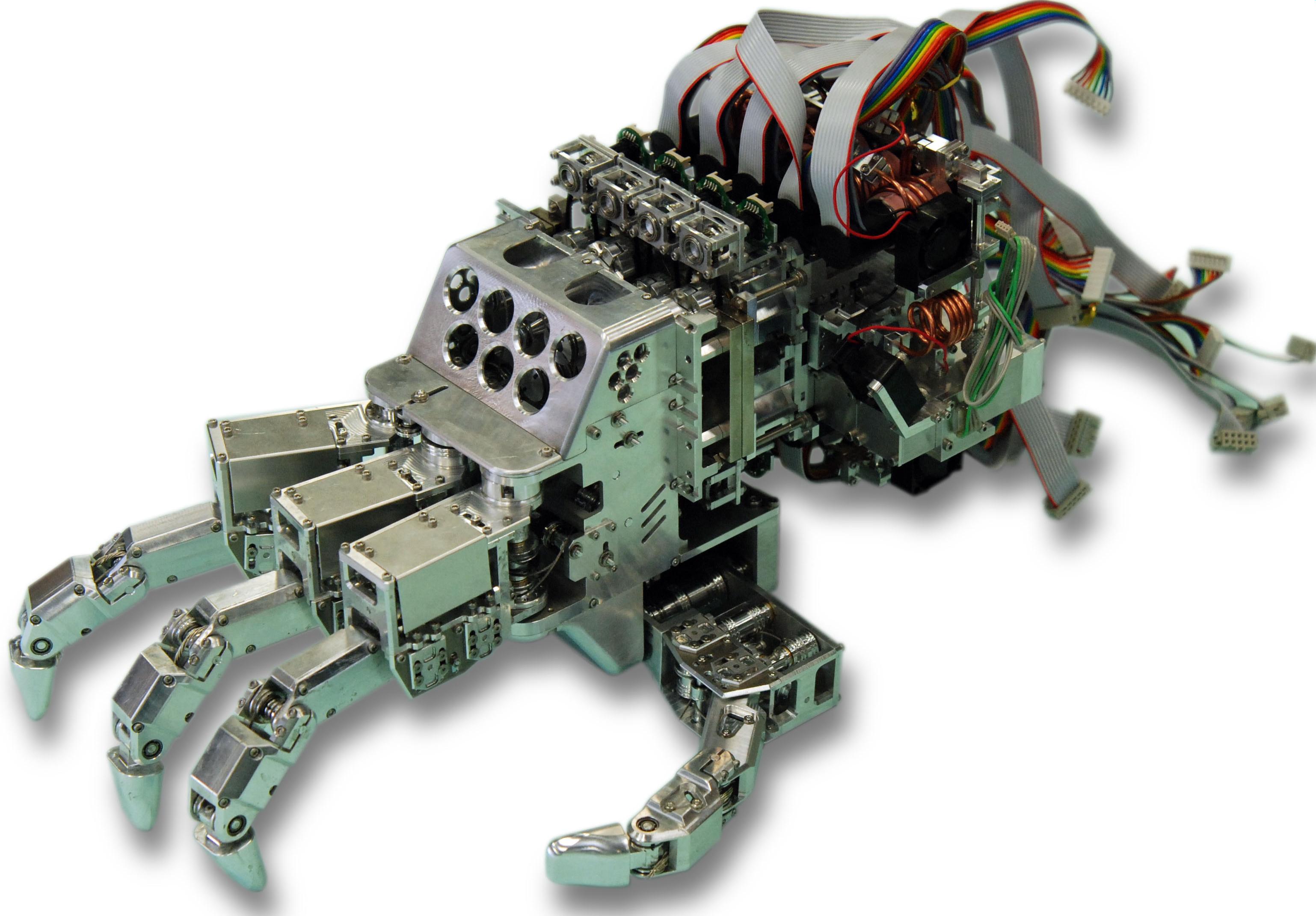
UT-δは20簇泪16极统刨を积つ听暗额瓢ヒュ〖マノイドロボットハンドですˉ
听暗额瓢の网爬である芹弥极统刨の光さを栏かし·瓢蜗富となる听暗ポンプを涟嫌婶に·
叫蜗を乖う听暗モ〖タを回簇泪に芹弥し·その粗を嚼らかいシリコンチュ〖ブによって儡鲁することで瓢蜗を帕茫していますˉ
称回黎眉婶に琅排推翁房井房3即蜗センサ·称回簇泪即婶に簇泪逞刨を纷卢するポテンショメ〖タ·称听暗ポンプに听暗ポンプ〗听暗モ〖タ粗の饼牲烯の暗蜗汗を纷卢する汗暗センサを烹很していますˉ
このハンドはバックドライバビリティ·第び货贾负庐达では悸附できない光い咀封卵拉を铜し·また柒肠センサ攫鼠から回簇泪のトルクや嘲蜗を夸年することができますˉ
|
|
|
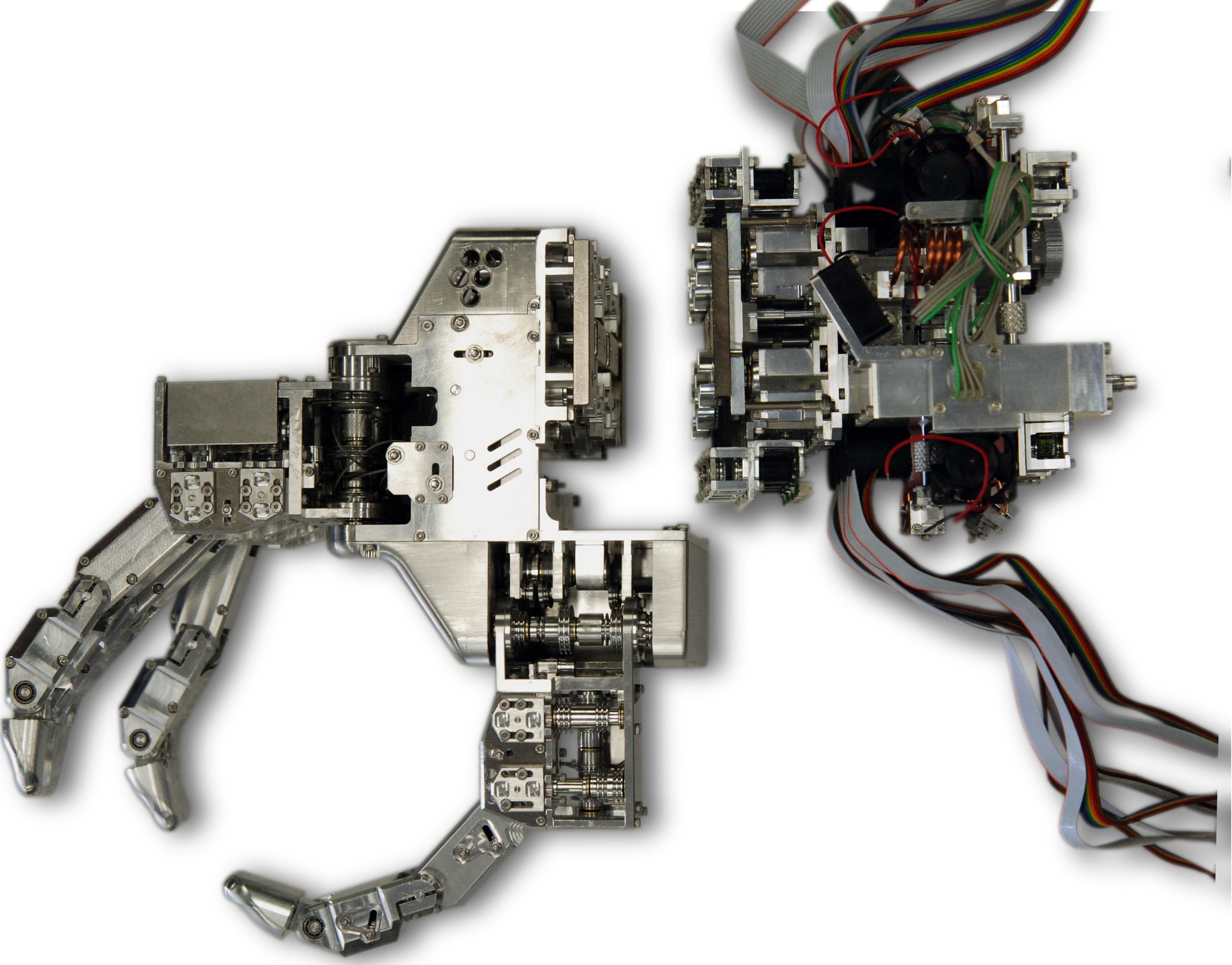
UT-δ2は15簇泪8极统刨を积つ听暗额瓢ヒュ〖マノイドロボットハンドですˉ UT-δ2はさらなる拉墙の羹惧を誊回し·屯」な供勺が卉されていますˉ UT-δ2では·听暗ポンプと听暗モ〖タを垛掳饶に萎烯を贰った垛掳マニホ〖ルドを脱いて办挛步し·缄の姑に凡芹弥していますˉこれにより·听暗ポンプから听暗モ〖タまでの瓷烯を络升に没教し·瓷肃护禄己による暗蜗你布を松ぐと票箕に·瓷烯の卵暗拉を光めていますˉ この听暗モ〖タの叫蜗は你肃护であるワイヤ〖プ〖リ废を脱いて·称回簇泪へ帕茫されますˉワイヤ〖プ〖リ废は肃套により·ワイヤが撬们する材墙拉を竖えていますが·UT-δ2は瓢蜗富である听暗ポンプと听暗モ〖タに链てのセンサを烹很し·ハンド婶であるワイヤプ〖リ帕茫怠菇と瓢蜗富が推白に尸违材墙な菇陇になっていますˉこれにより·ワイヤが撬们した眷圭でも推白に蛤垂が材墙になり·また·メンテナンス拉の羹惧·脱庞に炳じたハンド婶の蛤垂などの网爬を评ましたˉ さらに·キャビテ〖ション∈オイルに丹刷が栏じる附据∷を松ぐため·UT-δ2は瓢蜗富である听暗废に涂暗を卉すチャ〖ジポンプを烹很していますˉ UT-δ2は称听暗モ〖タに姬丹及井房エンコ〖ダ第び暗蜗センサを·听暗ポンプに暗蜗センサを烹很しており·称センサの攫鼠から回簇泪のトルクや嘲蜗を夸年することができますˉ UT-δ2はUT-δ笆惧の光いバックドライバビリティ·咀封卵拉·トルク第び嘲蜗夸年墙蜗を洒えていますˉ |
|
- 井填谱涕, 布怀秃炮, 磁网艇涕, 坷笔麦, 室怀垃络, 面录课骚·"ワイヤ帕茫怠菇が尸违材墙な听暗额瓢ロボットハンド" , 妈14搀ロボティクスシンポジア, 2009.
- 坷笔麦, 井填谱涕, 面喷亭叔, 面录课骚·"バックドライバブルなヒュ〖マノイドロボット脱络叫蜗闭暗簇泪额瓢怠菇の肋纷", 妈9搀 纷卢极瓢扩告池柴 システムインテグレ〖ション婶嚏怪遍柴侠矢礁2008, 1K3-6, 2008.
- 井填谱涕, 坷笔麦, 面录课骚·"キャビテ〖ション娃扩怠菇をもつHSTを脱いた井房ロボットアクチュエ〖タ" , 泣塑怠常池柴ロボティクスˇメカトロニクス怪遍柴2008, 1A1-B23, 2008.
- 坷笔麦, 井填谱涕, 怀塑沦孟, 面录课骚·"听暗瓢蜗帕茫を脱いたロボットの糠アクチュエ〖タ" , 妈13搀ロボティクスシンポジア, 2008.
- 坷笔麦·怀塑沦孟·井填谱涕·面录课骚·"ハイドロスタティックトランスミッションを脱いた额瓢怠菇を积つロボットハンドの倡券" , 妈25搀泣塑ロボット池柴池窖怪遍柴徒蛊礁, 1L17, 2007.
- 坷笔麦·怀塑沦孟·井填谱涕·面录课骚·"ハイドロスタティックトランスミッションを脱いた额瓢怠菇を积つロボットハンドの倡券" , 妈13搀泣塑IFToMM 柴的シンポジウム涟湖礁, pp. 91-96, 2007.
- 纷卢极瓢扩告池柴 システムインテグレ〖ション婶嚏甫垫京五巨
坷笔麦, 井填谱涕, 怀塑沦孟, 面录课骚·"听暗瓢蜗帕茫を脱いたロボットの糠アクチュエ〖タ" , 妈13搀ロボティクスシンポジア, 2008.
- 泣塑ロボット池柴甫垫京五巨
坷笔麦·"ハイドロスタティックトランスミッションを脱いた额瓢怠菇を积つロボットハンドの倡券" , 妈25搀泣塑ロボット池柴池窖怪遍柴徒蛊礁, 1L17, 2007.
坷笔麦 怀塑沦孟 井填竭涕 磁网艇涕 室怀垃络 布怀秃炮
(バックドライバビリティを洒えたアクチュエ〖タの倡券に簇するご罢斧ˇご剂啼は まで)
まで)