









 |
  |
In the future, the robot will work closer to human being than it does.
Such a robot needs flexibility to adapt the differences
between real environmental condition and assumed environmental condition.
We are developing the backdrivable actuators to equip the robot with flexibility.
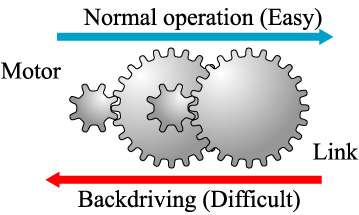
Backdrivability is the ability for interactive transmission of force between input axis and output axis.
To get high Backdrivability, we have to reduce friction of power transmission considerably.
Backdrivability provide actuators with high force sensitivity and high impact resistance which adapts to quick external force mechanically.
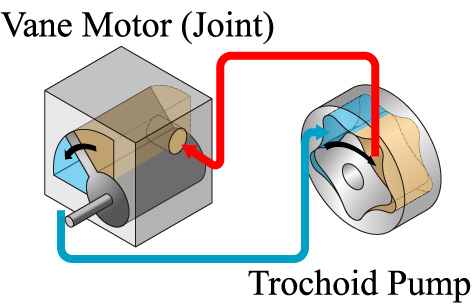
In this study, we have developed the actuator with backdrivability, using hydraulic system called "Electro-Hydrostatic Actuator" (or "Hydrostatic Transmission").
Implementing this actuator in robot hands, we have developed backdrivable robot hands.

 |
 |
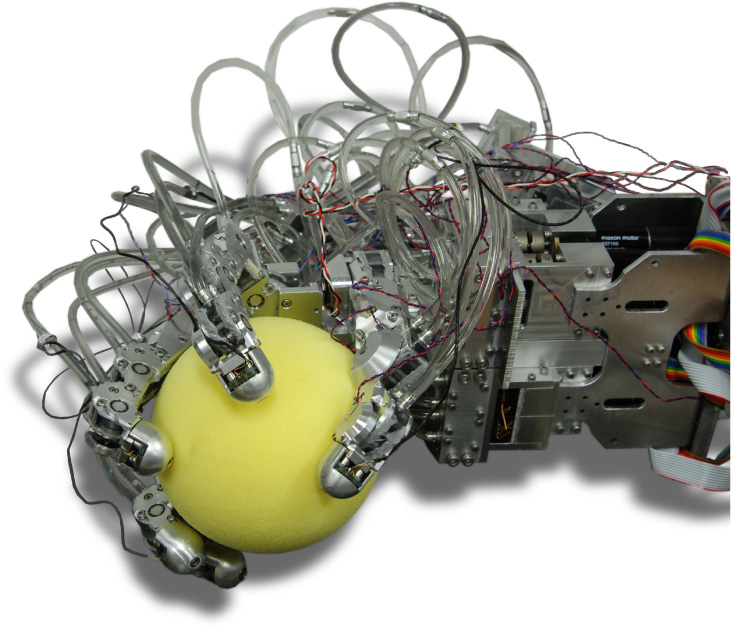
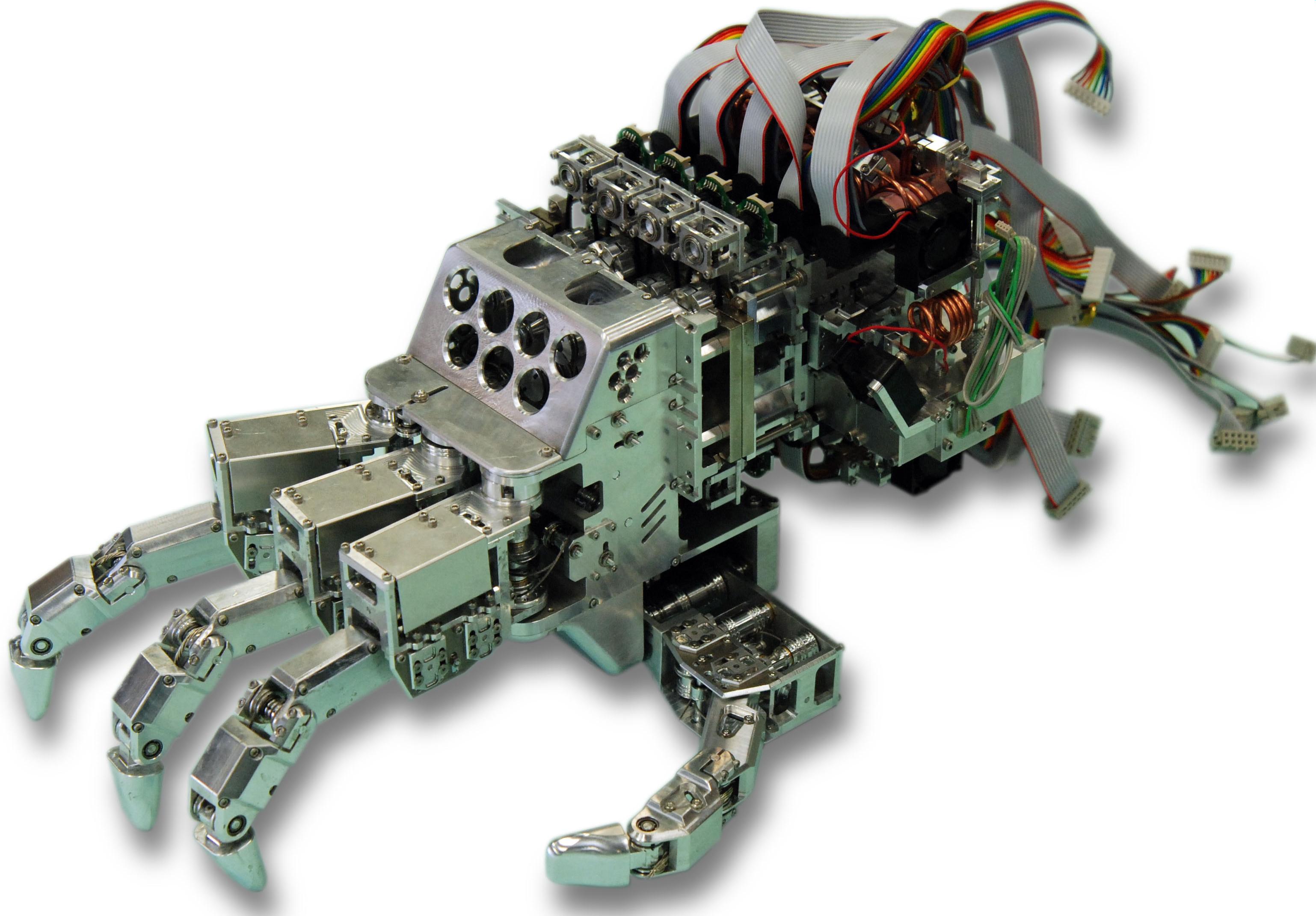
UT-δis a hydraulically driven robot hand which has 20 joints and 16 DOF(degree of freedom).
Taking advantage of high arrangement degree of freedom which is one of hydraulic features,
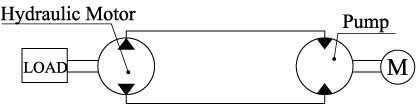
UT-δ has hydraulic pumps on antebrachial region, hydraulic motors in the joint of the finger.
Hydraulic pumps and hydraulic motors transfer the power to each other through flexible silicon tubes.
UT-δ has miniature capacitance type triaxial force sensors on the tip of the each finger,
potentiometers in the joint of the each finger, differential pressure sensors in the each hydraulic pumps
which measure differential pressure of round-trip hydraulic circuit between hydraulic pump and and hydraulic motors.
UT-δhas backdrivability and impact resistance which mechanical reduction gears can not have,
and is able to estimate torque and external force from data of internal sensors.
|
|
|
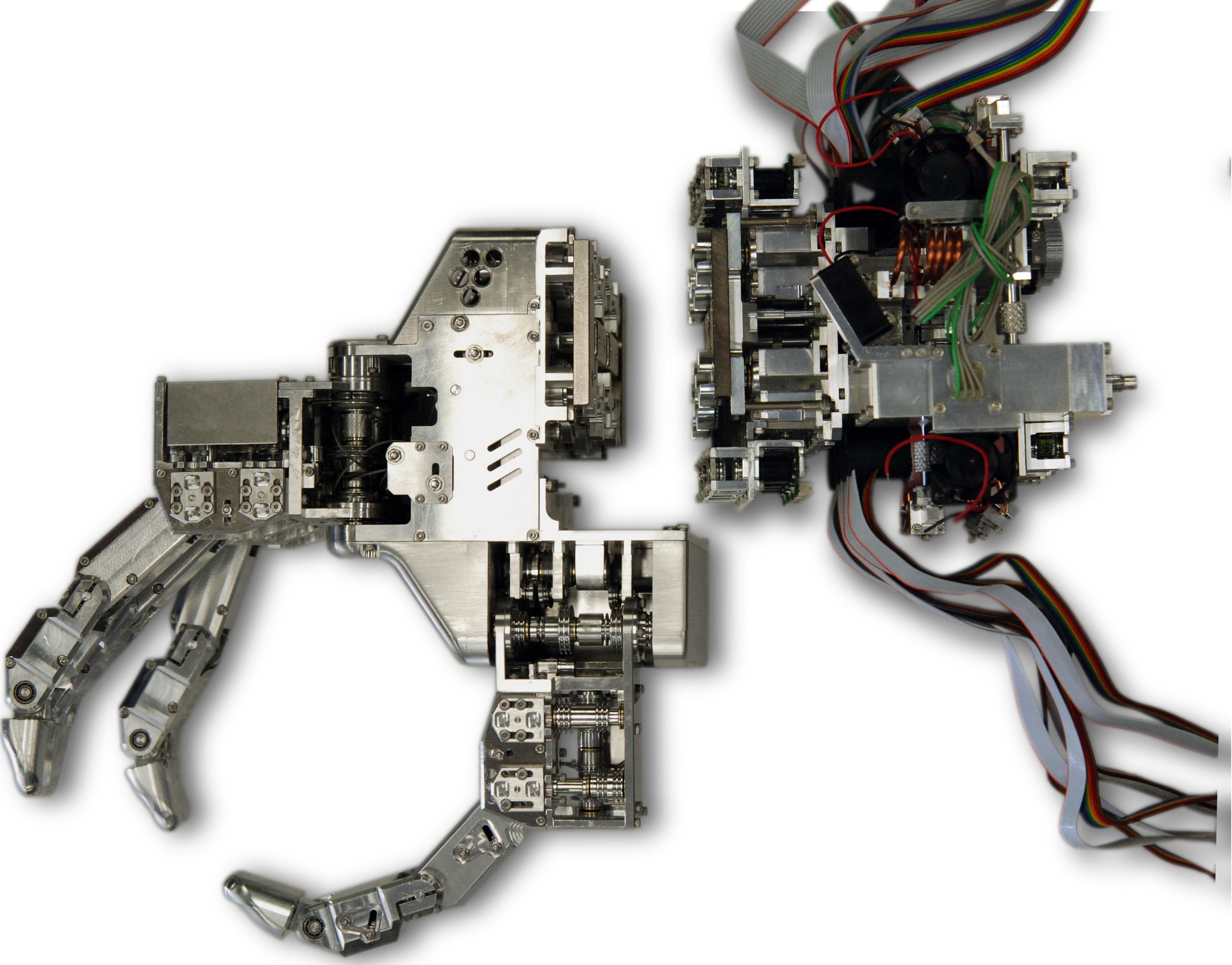
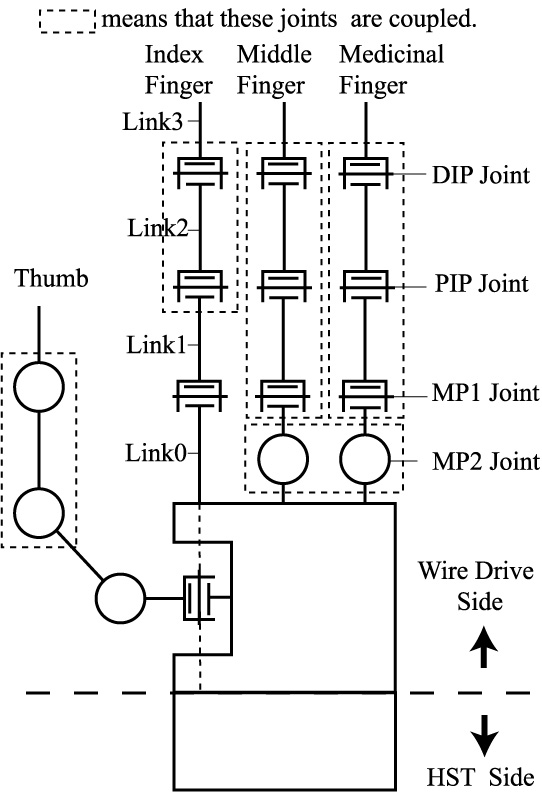
UT-δ2is a hydraulically driven robot hand which has 15 joints and 8 DOF(degree of freedom).
UT-δ2 is designed to get more high performance than UT-δ.
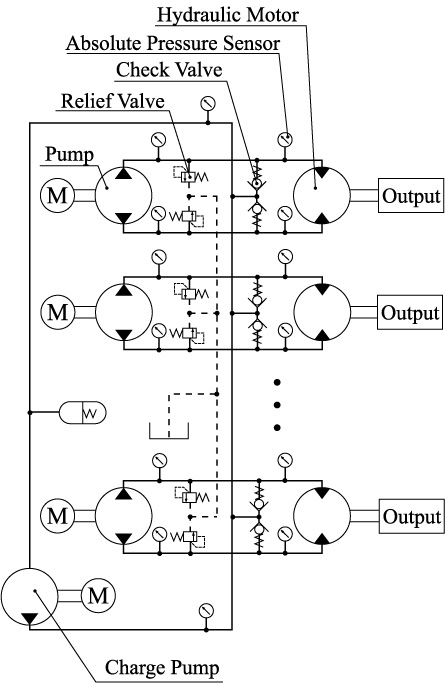
UT-δ2 has hydraulic pumps and motors on back of its hand, which areunitized with metal manifold drilled hydraulic circuit in.
Therefore the hydraulic lines are so short that the loss of pressure brought on by their frictions against the oils are privented, and get high pressure resistance
Output torques of these hydraulic motors are transmitted to the joints of the fingers by wire-pulley system. Wire-pulley system remains possible that the wire might be fractured by its attrition. However, hydraulic pumps and motors have all sensors used in UT-δ2, are detachable from wire-pulley transmission easily. Therefore, if the wire is fractured, wire-pulley transmission is able to be changed easily, besides UT-δ2 get several advantages, easy maintenance, exchange of wire-pulley transmission for purpose of use. UT-δ2 has a charge hydraulic pump which pressurizes hydraulic circuits of UT-δ2 power source, to prevent from cavitation. UT-δ2 has magnetic miniature encoders and pressure sensors in each hydraulic motors, pressure sensors in each hydraulic pump. And the data from these sensors leads torques and external forces at the joints of the figures. UT-δ2 has higher backdrivability, impact resistance and estimation accuracy of torque and external force than UT-δ. |
|
- Junya Ono, Yuto Shimoyama, Tomoya Amari, Hiroshi Kaminaga, Yukihiro Katayama, and Yosihiko Nakamura
"Hydraulically Driven Robot Hand with Detachable Wire Tendon Mechanism" , The 14th Robotics Symposia, 2009.
- Hiroshi Kaminaga, Junya Ono, Yusuke Nakashima, and Yosihiko Nakamura
"Development of Backdrivable Hydraulic Knee Joint Mechanism for Humanoid Robots" , The 9th Conference of the System Integration Division of the Society of Instrument and Control Engineers, 1K3-6, 2008.
- Junya Ono, Hiroshi Kaminaga, and Yosihiko Nakamura
"HST with Anti-Cavitation Mechanism for Miniature Robot Actuator" , Robomec'08, 1A1-B23, 2008.
- Hiroshi Kaminaga, Junya Ono, Taichi Yamamoto, Yosihiko Nakamura
"New Robot Actuator Using Hydrostatic Transmission" , The 13th Robotics Symposia, 2008.
- Hiroshi Kaminaga, Taichi Yamamoto, Junya Ono, Yosihiko Nakamura
"Anthropomorphic Robot Hand with Hydrostatic Actuators" , The 25th Annual Conference of the Robotics Society of Japan, 1L17, 2007.
- Hiroshi Kaminaga, Taichi Yamamoto, Junya Ono, Yosihiko Nakamura
"Anthropomorphic Robot Hand with Hydrostatic Actuators" , The 13th Jc-IFToMM Symposium, pp. 91-96, 2007.
- The Society of Instrument and Control Engineers System Integration Division Excellence Awards
Hiroshi Kaminaga, Junya Ono, Taichi Yamamoto, Yosihiko Nakamura "New Robot Actuator Using Hydrostatic Transmission" , The 13th Robotics Symposia, 2008
- The Robotics Society of Japan Young Investigation Excellence Awards
Hiroshi Kaminaga "Anthropomorphic Robot Hand with Hydrostatic Actuators" , The 25th Annual Conference of the Robotics Society of Japan, 1L17, 2007.
Hiroshi Kaminaga, Taichi Yamamoto, Junya Ono, Tomoya Amari, Yukihiro Katayama, Yuto Shimoyama
(Your opinions and questions about The Development of actuators with Backdrivability are welcome.E-mail at )
)