






A typical conventional humanoid robot is composed just as 'a box with a head and a couple of arms and legs', which is not necessarily the best idea of design.
Since the humanoid robot is a system that stands on their feet onto the ground and moves over frequent contacts and collisions with the environment, it has an absolutely different principle of motor dynamics from industrial manipulators, so that it should be designed according to its original methodology. This project is aiming at the exploration of evolutive mechanism design and control for the enhancement of humanoid motion.

UT-θ
 |
|
|||||||||||||||||||
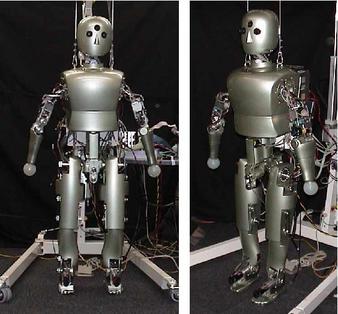
The above shows the external view of UT-θ. A curved shape of dicast exoskeletal structure contributes to the light and stiff body. UT-θ equips the core CPU board with PISA bus, Titech Version2 and TID(Titech Intelligent Driver) for motor drivers, Ritech for I/O(D/A conversion, A/D conversion, and pulse count), monochrome progressive camera (x2) (for stereo-scopic vision) + color NTSC camera (x1) (for color recognition) at the head, IP5000(Hitachi inc.) for vision processing, 6-axis force(Nitta) at the elbows and ankles, and 3-axis accelerometer and gyro at the trunk.
UT-θ has the following three unique parts
- Cybernetic shoulder (Shoulder)
- Double Spherical Joint (Hip)
- Backlush Clutch (Knee)
UT-θ2
 |
|
|||||||||||||||||
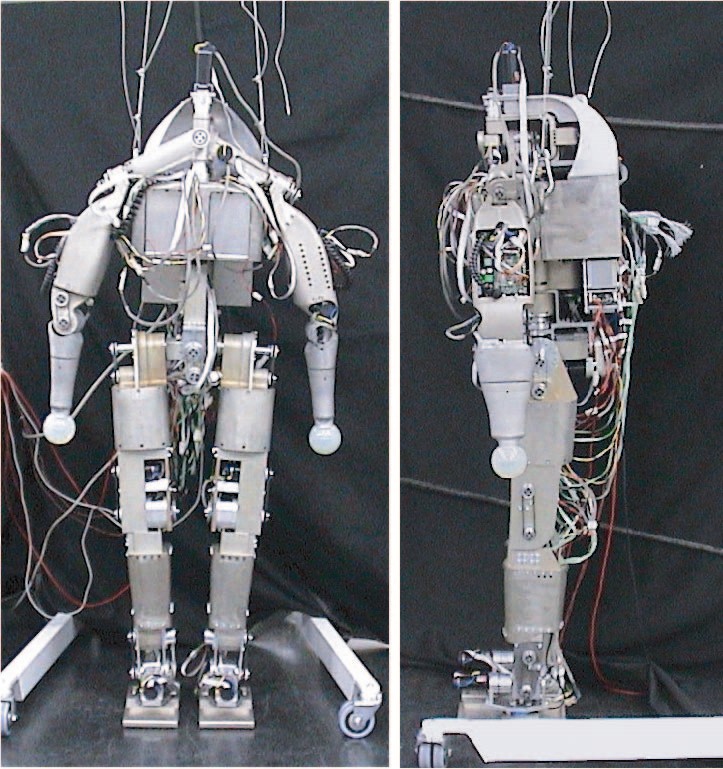
The above shows the external view of UT-θ2. The basic concept is the same of UT-θ however, the actuators and the gears are more powerful than UT-θ, the legs and hip(Double spherical joint) parts more stiff, and TMC1Controler/TMD1Driver(3TEC) for motor drivers(D/A conversion, A/D conversion, and pulse count) enables independent joint position control through serial input from main PC. The main feature of UT-θ2 is its shoulder joint. Double spherical joint for shoulder joints enables wide workspace of both two arms.
UT-θ2 has the following three unique parts
- Double Spherical Joint (Shoulder)
- Double Spherical Joint (Hip)
- Backlush Clutch (Knee)
- Tetsuya Sinohara,Shigeki Ban,Tatsuya Gotoh,Tetsunari Inamura,Masafumi Okada,Yoshihiko Nakamura, Development of humanoid robot with "Double spherical hip joint" (written in Japanese), Proceedings of the 20th Annual Conference of the Robotics Society of Japan, 1C16, 2002
- Masafumi Okada,Tatsuya Gotoh,Yoshihiko Nakamura, Design of Knee Joint Mechanism that Follows External Force for Biped Walking Robots (written in Japanese), Proceedings of the 20th Annual Conference of the Robotics Society of Japan, 1C19, 2002
- Guillaume Chevant,Yoshihiko Nakamura, Making H-Anim Model for Kinematic and Dynamic Simulation of Humanoid Robot, Proceedings of SICE System Integration Division Annual Conference(SI2002), 2P13-05, 2002
- Lekskulchai Pongsak,Masafumi Okada,Yoshihiko Nakamura, Optimal filtering for humanoid robot state estimators, Proceedings of SICE System Integration Division Annual Conference(SI2002), 2P13-04, 2002
- T. Shinohara, M. Okada, and Y. Nakamura, Development of hip joint mechanism for humanoid robot (written in Japanese), Proceedings of SICE System Integration Division Annual Conference(SI2002),2P13-03, 2002
- Tetsuya SHINOHARA,Naoyuki HIBARA,Masafumi OKADA,Yoshihiko NAKAMURA, Mechanisms and Motion Control for Mobility Evolution of Humanoid Robots (written in Japanese), Proceedings of the 2003 JSME Conference on Robotics and Mechatronics (ROBOMEC'03), 2P1-3F-C3, 2003
- Shigeru KANZAKI, Masafumi OKADA, Yoshihiko NAKAMURA, Walking Control for Humanoid with Backlush Clutch (written in Japanese), Proceedings of the 2003 JSME Conference on Robotics and Mechatronics (ROBOMEC'03),2P1-3F-C2, 2003
- Yusuke YAMAMOTO, Masafumi OKADA, Yoshihiko NAKAMURA, Development of "Double spherical shoulder joint" for humanoid robots (written in Japanese), Proceedings of the 21st Annual Conference of the Robotics Society of Japan, 2A25, 2003
- Lekskulchai Pongsak,Masafumi Okada,Tetsuya Shinohara,Yoshihhiko Nakamura, Attitude estimation by compensating gravity direction, Proceedings of the 21st Annual Conference of the Robotics Society of Japan, 2A23, 2003
- Penasse Vincent,Yoshihiko Nakamura, Dance motion synthesis with music synchronization, Proceedings of the 21st Annual Conference of the Robotics Society of Japan, 2J28, 2003
- Masafumi Okada, Tetsuya Shinohara, Tatsuya Gotoh, Shigeki Ban, and Yoshihiko Nakamura, Double Spherical Joint and Backlash Clutch for Lower Limbs of Humanoids, Proceeding of IEEE International Conference on Robotics and Automation(ICRA2003), pp.491-496, Taipei, Taiwan, September, 2003
- M.Okada, T.Shinohara, T.Gotoh, S.Ban and Y.Nakamura, Humanoid Robot Mechanisms for Responsive Mobility, Proceedings of the 2nd International Symposium on Adaptive Motion of Animals and Machines, SaP-III-3, Kyoto, March, 2003
- Yusuke Yamamoto, Michiki Nakano, Masafumi Okada, Yoshihiko Nakamura, Humanoid Robot with "Double Spherical Shoulder Joint" (written in Japanese), Proceedings of the 22st Annual Conference of the Robotics Society of Japan, 1L27, 2004
- Michiki Nakano, Masafumi Okada, Yoshihiko Nakamura, Design of the Wire Driven Ankle Mechanism with High Backdrivability (written in Japanese), Proceedings of the 2004 JSME Conference on Robotics and Mechatronics (ROBOMEC'04), 2P2-L1-12, 2004
- Masafumi Okada and Yoshihiko Nakamura, Development of a Cybernetic Shoulder -A Three-DOF Mechanism That Imitates Biological Shoulder Motion-, IEEE Transactions on Robotics, vol. 21, no.3, pp.438-443, 2005
- Dirk Wollherr, Yoshihiko Nakamura, and Fabio Zonfrilli, Active-Passive Knee Control for the Humanoid UT-Theta, IEEE International Conference on Advanced Robotics, pp.692-697, Seattle, USA, July 18-20, 2005.
- Fabio Zonfrilli, Dirk Wollherr, and Yoshihiko Nakamura, Walking Control of the Humanoid UT-Theta, IEEE International Conference on Advanced Robotics, pp.698-704, Seattle, USA, July 18-20, 2005.
- Ko Ayusawa, Taichi Yamamoto, Yoshihiko Nakamura, Biped Walking which Exploits the Dynamics of Passive Joint (written in Japanese), Proceedings of the 2006 JSME Conference on Robotics and Mechatronics (ROBOMEC'06), 2P1-B24, 2006
Masafumi Okada, Shigeki Ban, Tetsuya Shinohara, Vincent Penasse, Guillaume Chevant, Tatsuya Gotoh, Naoyuki Hibara, Pongsak Lekskulchai, Shigeru Kanzaki, Yusuke Yamamoto, Michiki Nakano, Dirk Wollherr, Fabio Zonfrilli, Taichi Yamamoto, Ko Ayusawa
(Your opinions and questions about are welcome.E-mail at )
)
