






|
|
|
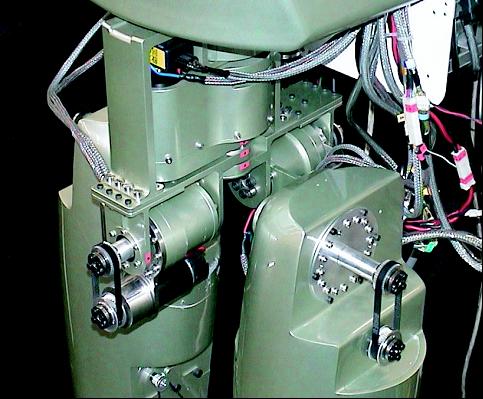
Double Spherical Joint(Hip) |
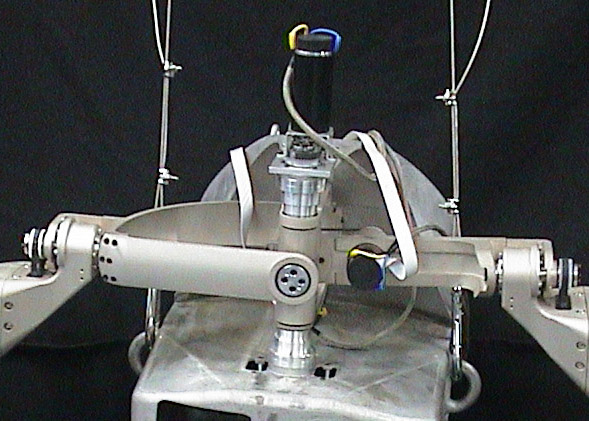
Double Spherical Joint(Shoulder) |
Double Spherical Joint is a combined couple of spherical joints with the shared center of rotation as its name figures.
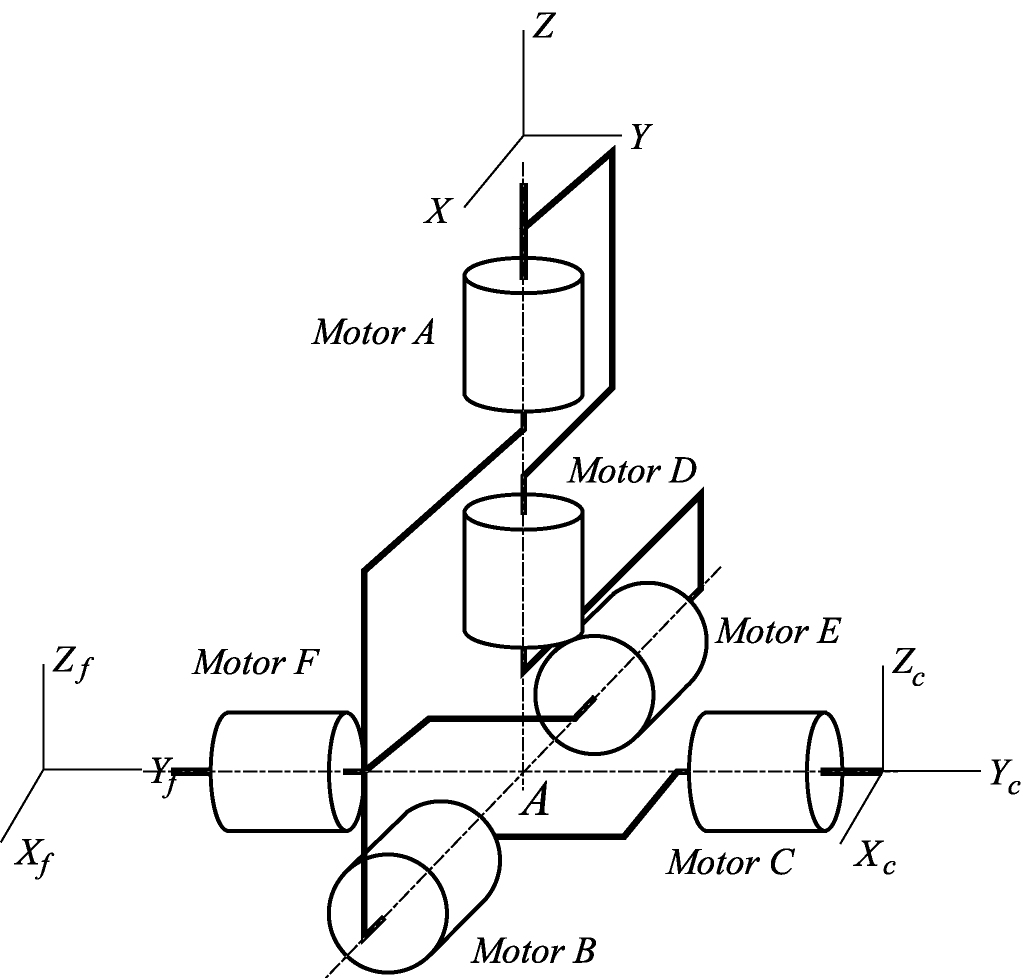
This Joint is adopted for a hip joint both of UT-θ and θ2 , and for a shoulder joint of UT-θ2.
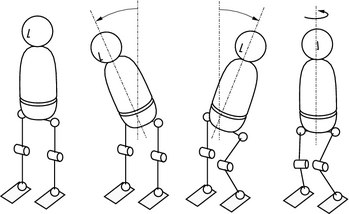
An offset between the two hip joints of conventional bipeds commonly necessitates complex configuration in order to control the orientation of the upper body as shown in the above figure. Addition of the waist joint, which enables an easy control of the trunk attitude, simultaneously leads to the increase of the size and weight of the robot.
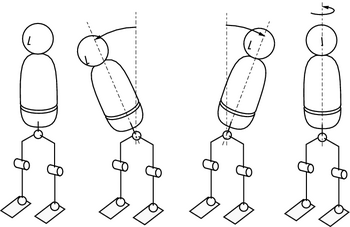
Double spherical joint can emulate the function of the waist joint in addition to that of the ordinary hip joints. In other words, the double spherical hip joint plays a role for the waist joint without any extra components. The advantage of this separable upper body motion and lower particularly appears in the stabilization of motion, in which the trunk motion is independently controlled so as to recover the whole body posture without interfering the foot placement.
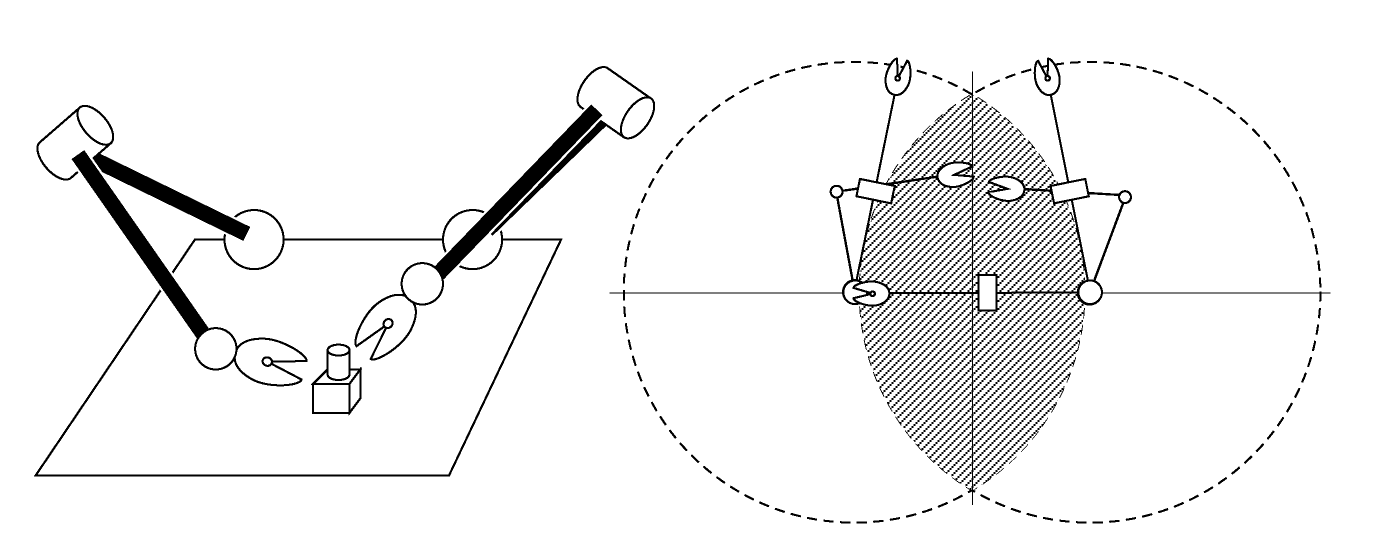
On the other hand, an offset between the two shoulder joints of robot arms also necessitates complex configuration, in order to handle with both left and right hands. And as shown in the above figure, the reaching space of both hands is limited.
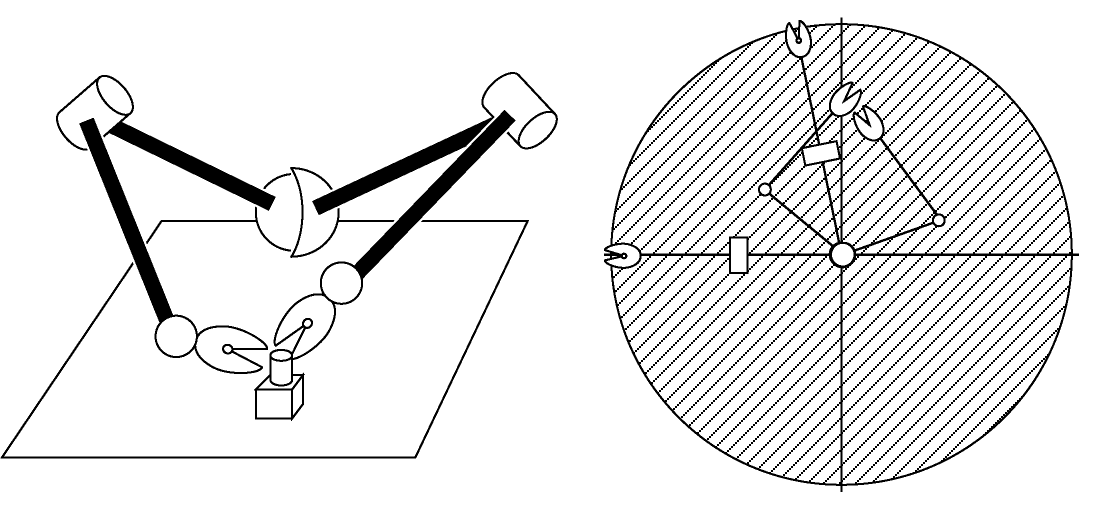
If both left and right arms are attached at the same point with Double spherical joint, the robot can rotate arms freely with holding both hands as shown in the above figure, and enables wide workspace without additional joints.
