









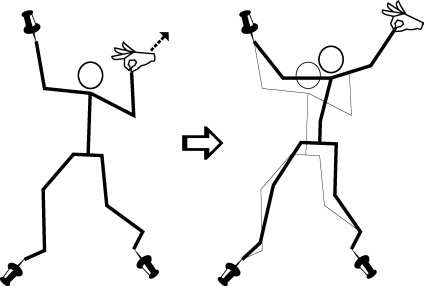
図1 インタフェースのイメージ
概要
図1のように任意のリンクをいくつでもピン止めし,別のリンクをドラッグすることにより,直感的にヒューマンフィギュアの運動やポーズを生成することのできる逆運動学計算法である.多数の拘束を加えたときに生じる特異点の問題を回避するため,拘束を2つの優先度に分けているのが特徴である.
このアルゴリズムはセガのアニメーション作成ソフト「アニマニウム」の計算エンジンとして実装されている.

- K. Yamane and Y. Nakamura: "Natural Motion Animation through Constraining and Deconstraining at Will," IEEE Transactions on Visualization and Computer Graphics, vol.9, no.3, pp.352-360, 2003.
- 山根,中村: "ヒューマンフィギュアの全身運動生成のための協応構造化インタフェース," 日本ロボット学会誌, vol.20, no.3, pp.113-121, 2002.
- K. Yamane and Y. Nakamura: "Synergetic CG Choreography through Constraining and Deconstraining at Will," Proceedings of International Conference on Robotics and Automation, pp.855-862, Washington DC, May 2002.
受賞・特許
| ・受賞 | ||
| ― | International 3D Awards, Technological Innovation Award (2003) |
| ・特許 | |||
| 出願人 | : | 東京大学長 | |
| 発明者 | : | 中村 仁彦,山根 克 | |
| 名称 | : | 木構造リンク系のポーズおよび動作を生成する方法 | |
| 公開日 | : | 2003年2月28日 | |
| 公開番号 | : | 特開2003-58907 |
メンバー
山根 克
(力学的整合性を考慮した運動生成に関するご意見・ご質問は まで)
まで)