









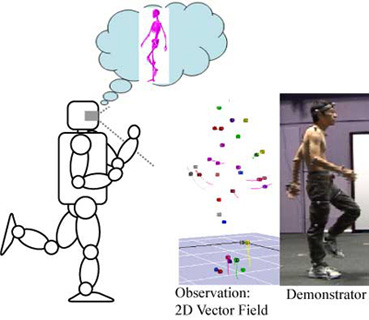
Fig. 1 3D Motion Mimesis from 2D Images
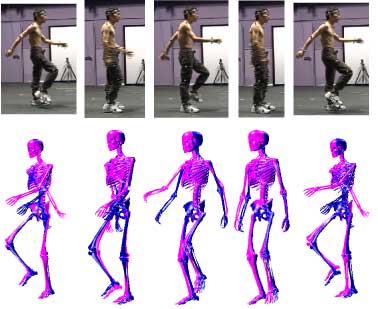
Fig. 2 (top) Demonstrator’s 2D motion
(bottom) Imitated 3D motion model (blue) is compared with real model (magenta)
概要
ヒューマノイドにおける模倣スキルは多くの注目を浴びています. というのも模倣は最も原初的で根源的な知能の要素であり,また学習において 膨大な試行なしにプログラムの自動化が図れるからです. 神経科学での ミラーニューロンの発見にヒントを得て,YNLではミラーニューロンに相当する HMM(HiddenMarkovModel)を用いたミメシスモデルの研究を進めました.
ミメシスモデルはよい数学的枠組みですが,現実世界へ適用するにあたり 部分観測と多種のセンサデータを扱うという重要な問題があります. そのため私たちは,シンボル化された運動データベースを基にした統計的推論により "不完全な観測からの完全な運動の模倣"の研究を行いました. 提案手法により次の問題を解決しました.
- 2次元の像からの3次元運動への模倣
- 遮られた観測からの全身運動の模倣
- 単眼カメラ映像からのモーションキャプチャリング

- Dongheui Lee and Yoshihiko Nakamura, Mimesis Scheme using a Monocular Vision System on a Humanoid, in Proc. 2007 IEEE int'l. Conf. on Robotics and Automation (ICRA'07), pp. 2162-2168, Rome, Italy, Apr 10-14, 2007
- Dongheui Lee and Yoshihiko Nakamura, Stochastic Model of Imitating a New Observed Motion Based on the Aquired Motion Primitives, In Proc. 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS'06), pp. 4994-5000, Beijing, China, Oct. 10-13, 2006
- Dongheui Lee and Yoshihiko Nakamura, Mimesis from Partial Observations, In Proc. of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS'05), pp. 1911-1916, Aug. 2005
- Dongheui Lee and Yoshihiko Nakamura, Probabilistic Model of Whole-body Motion Imitation from Partial Observations, In Proc. of The 12th International Conference on Advanced Robotics (ICAR'05), pp.337 ? 343, Seattle, July 18-20, 2005
- 李東姫, 中村 仁彦, ベクトル場の2D部分観測による人間の動作理解:パーティクルフィルタに基づく手法, ロボティクス・メカトロニクス講演会2007 (ROBOMEC'2007) , Akita, Japan, May 10-12, 2007
- Dongheui Lee and Yoshihiko Nakamura, Stochastic Theory for Motion Capturing from Onboard Monocular Vision of Humanoid Robots," 第12回ロボティクスシンポジア, 4B2, pp.424-429, Nagaoka, JAPAN, Mar 15-16, 2007
- 李東姫, 中村 仁彦, ミメシスモデルに基づいた深さ情報を持たない画像からの運動認識, 第24回日本ロボット学会学術講演会 (RSJ'2006), 1M23, Okayama,Japan, September 14-16, 2006
- Dongheui Lee and Yoshihiko Nakamura, Relaxed Viterbi Training: Fast and Reliable Symbol Acquisition of Mimesis Model, 第24回日本ロボット学会学術講演会 (RSJ'2006), 2D22, Okayama,Japan, September 14-16, 2006
- 李東姫, 中村 仁彦, 統計的ミメシスモデル:部分観測からの認識と生成, ロボティクス・メカトロニクス講演会2006 (ROBOMEC'2006) , 1P1-E11, Waseda, Tokyo, Japan, May 26-28, 2006
受賞・特許
メンバー
李東姫, 九乗博俊
(部分観測からの認識と生成に関するご意見・ご質問は まで)
まで)