









The purpose of the research is to propose a novel brain-like information processing framework which can connect motion patterns and symbols. We have focused on two knowledge:"Mimesis Theory" and "Mirror Neurons" for the purpose. The discovery of mirror neurons[1] have been a notable topic of brain science which have been found in primates' brain and humans' brain, fire when the subject observes a specific behavior and also fire when the subject start to act the same behavior. Furthermore, it is located on Broka's area which has close relationship between language management. The fact suggests that the behavior recognition process and behavior generation process are combined as the same information processing scheme, and the scheme is nothing but a core engine of symbol manipulation ability. Indeed, in Donald's "Mimesis Theory"[2], it is said that symbol manipulation and communication ability are founded on the behavior imitation, that is integration of behavior recognition and generation. We believe that a paradigm can be proposed taking advantage of the mirror neurons, with considerations of Deacon's contention[3] that the language and brain had evolved each other.
For the purpose, we have developed following four frameworks:
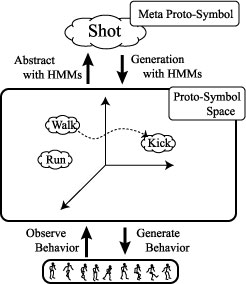
- Mutual connection model between motion patterns and symbols based on hidden Markov model,
- Keyframe compression and decompression for time-series data based on the continuous hidden Markov model,
- Imitation learning model with embodiment based on discrete continuous hybrid HMM,
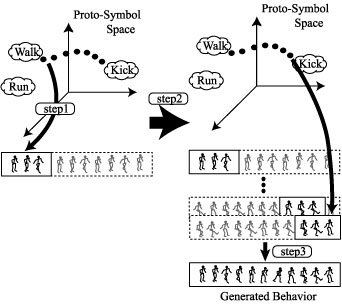
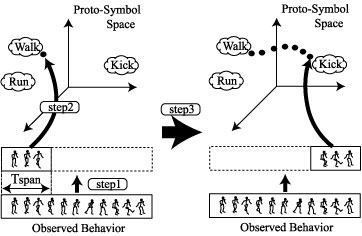
- Development and manipulation of proto-symbols based on geometric proto-symbol space.
For the details, please refer to
http://www.rdc.imi.i.u-tokyo.ac.jp/robotbrain/results/pdf/inamura.pdf

- Tetsunari Inamura, Yoshihiko Nakamura, Iwaki Toshima, Hideaki Ezaki : An Integrated Model of Imitation Learning and Symbol Emergence based on Mimesis Theory, Journal of the Robotics Society of Japan, Vol.22, No.4, (In printing).
- Tetsunari Inamura, Yoshihiko Nakamura and Iwaki Toshima : Embodied Symbol Emergence based on Mimesis Theory, International Journal of Robotics Research, (In printing).
- Tetsunari Inamura : Application of Bayesian Networks to Robotics - Empirical Autonomous Behavior Model for Real World Oriented Robots -, Journal of the Japanese Society for Artificial Intelligence, Vol.17, No.5, pp. 546-552, 2002.
- Tetsunari Inamura, Hiroaki Tanie and Yoshihiko Nakamura : From Stochastic Motion Generation and Recognition to Geometric Symbol Developement and Manipulation, Proc. of Int'l Conf. on Humanoid Robots (Humanoids 2003), 2003.
- Tetsunari Inamura, Hiroaki Tanie and Yoshihiko Nakamura : Keyframe Compression and Decompression for Time Series Data based on Continuous Hidden Markov Models, Proc. of Int'l Conf. on Intelligent Robots and Systems (IROS 2003), 2003.
- Tetsunari Inamura, Hiroaki Tanie, Iwaki Toshima and Yoshihiko Nakamura : An Approach from Motion Generation/Recognition to Intelligence based on Mimesis Principle, Proc. of Int'l Symposium on Adaptive Motion of Animals and Machines, pp. SaA-II-1, 2003.
- Tetsunari Inamura, Yoshihiko Nakamura and Moriaki Simozaki : Associative Computational Model of Mirror Neurons that connects Missing Link between Behaviors and Symbols, Proc. of Int'l Conf. on Intelligent Robots and Systems (IROS 2002), pp. 1032-1037. 2002.
- Tetsunari Inamura, Iwaki Toshima and Yoshihiko Nakamura : Acquiring Motion Elements for Bidirectional Computation of Motion Recognition and Generation, Proc. of Int'l Symposium. on Experimental Robotics (ISER2002), pp. 357-366. 2002.
- Tetsunari Inamura, Iwaki Toshima and Yoshihiko Nakamura : Acquisition and Embodiment of Motion Elements in Closed Mimesis Loop, Proc. of Int'l Conf. on Robotics and Automation (ICRA2002), pp. 1539-1544, 2002.
- Tetsunari Inamura, Yoshihiko Nakamura, Iwaki Toshima, and Hideaki Ezaki : Mimesis Embodiment and Proto-symbol Acquisition for Humanoids, Proc. of Int'l Conf. on Advanced Intelligent Mechatronics (AIM 2001), pp.159-164, 2001.
- Tetsunari Inamura, Yoshihiko Nakamura, Hideaki Ezaki, and Iwaki Toshima : Imitation and Primitive Symbol Acquisition of Humanoids by the Integrated Mimesis Loop, Proc. of Int'l Conf. on Robotics and Automation (ICRA 2001), pp. 4208-4213, 2001.
- Qiang Huang, Yoshihiko Nakamura and Tetsunari Inamura : Humanoids Walk with Feedforward Dynamic Pattern and Feedback Sensory Reflection, Proc. of Int'l Conf. on Robotics and Automation (ICRA 2001), pp.4220-4225, 2001.
- Tetsunari Inamura, Hiroaki Tanie and Yoshihiko Nakamura : Proto-Symbol Development and Manipulation in the Geometry of Stochastic Model for Motion Generation and Recognition, Workshop of Neurocomputing Technical Group (NC), the Institute of Electronics, Information and Communication Engineers, 2003.
- Tetsunari Inamura, Hiroaki Tanie and Yoshihiko Nakamura : Proto-Symbol Development and Manipulation in the Geometry of Stochastic Model for Motion Generation and Recognition, Int'l Conf. on Intelligent Robots and Systems, Workshop on Birateral Paradigms of Human and Humanoid, 2003.
- Tetsunari Inamura, Hiroaki Tanie, Yoshihiko Nakamura : Keyframe extraction and decompression for time series data based on continuous Hidden Markov Models, Proc. of the 21st Annual Conference of the Robotics Society of Japan, pp. 2J22, 2003.
- Hiroaki Tanie, Tetsunari Inamura, Yoshihiko Nakamura : Abstract of Proto-Symbol Sequence based on Proto-Symbol Space using Statistic Information, Proc. of the 21st Annual Conference of the Robotics Society of Japan, pp. 3K36, 2003.
- Tetsunari Inamura, Hiroaki Tanie, Yoshihiko Nakamura : Accumulation of Behavior Intelligence based on Single Model of Motion Recognition/Generation and Its Discrete Hierarchy, Proc. of the 17th Annual Conference of Japanese Society for Artificial Intelligence, pp. 3D4-04, 2003.
- Hiroaki Tanie, Tetsunari Inamura, Yoshihiko Nakamura : Construction of Proto-Symbol Space in which stored Motion Pattern by Continuous HMMs adopted Topological Structure, Proc. of the 17th Annual Conference of Japanese Society for Artificial Intelligence, pp. 3D4-03, 2003.
- Tetsunari Inamura, Hiroaki Tanie, Yoshihiko Nakamura : Keyframe extraction and decompression for time series data based on continuous Hidden Markov Models, Proc. of the JSME Conference on Robotics and Mechatronics, pp. 2P1-3F-C6, 2003.
- Tetsunari Inamura, Hiroaki Tanie, Yoshihiko Nakamura : Construction of proto-symbol space for relationship description between abstract motion by Hidden Markov Models, Proc. of the JSME Conference on Robotics and Mechatronics, pp. 2P2-3F-B2, 2003.
- Hiroaki Tanie, Tetsunari Inamura, Yoshihiko Nakamura : Mathematical Model of Mimesis: Motion Recognition and Generation in Hierarchical Proto-Symbol Space using Hidden Markov Models, Proc. of the JSME Conference on Robotics and Mechatronics, pp. 2P2-3F-B3, 2003.
- Tetsunari Inamura, Yoshihiko Nakamura : An approach from motion generation/recognition to intelligence based on the mimesis principle, -A developmental model of mirror neurons-, Proc. of the 8th Robotics Symposia, pp.246-251, 2003.
- Tetsunari Inamura, Yoshihiko Nakamura : Acquiring Bidirectional Computation Model of Motion Recognition and Generation and Its Application to Humanoids, Proc. of the 3rd SICE System Integration Division Annual Conference (SI2002), Vol II, pp. 141-142, 2002.
- Tetsunari Inamura, Yoshihiko Nakamura : Mirror Neurons Models which absorb Difference of Body Conditions between Teacher and Learner, Proc. of the 20th Annual Conference of the Robotics Society of Japan, p. 3H18, 2002.
- Tetsunari Inamura, Yoshihiko Nakamura and Iwaki Toshima : Acquiring Bi-directional Computation Model of Motion Recognition and Generation and Its Application to Humanoids, Workshop on Embodied Artificial Intelligence, Zurich, 2002.
- Tetsunari Inamura, Yoshihiko Nakamura, Iwaki Toshima : Acquisition of Motion Elements for Bi-directional Computation Model of Motion Recognition and Generation, The Summer Workshop on Mechanism on Brains and Minds, 2002.
- Tetsunari Inamura and Yoshihiko Nakamura : Integrated Empirical Symbol Grounding Model based on Conjunction Attention between Human and Robots, Bayesian Network Seminar, 2002.
- Iwaki Toshima, Tetsunari Inamura, Yoshihiko Nakamura : A Simultaneous Learning Model for Behavior Recognition and Aquisition using Continuous/Discrete Hybrid HMMs, Proc. of the JSME Conference on Robotics and Mechatronics, 2A1-L05, 2002.
- Tatsuya Ishihara, Tetsunari Inamura, Yoshihiko Nakamura : Realization of Adaptive Behavior Selector based on the Interaction between Sensory and Motor Information Processing, Proc. of the JSME Conference on Robotics and Mechatronics, 2P1-K08, 2002.
- Tetsunari Inamura, Iwaki Toshima, Yoshihiko Nakamura : Emergence of Proto-Symbols and Acquisition of Motion Patterns for Humanoids based on Mimesis, Proc. of the 16th Annual Conference of Japanese Society for Artificial Intelligence, 1D1-02, 2002
- Tetsunari Inamura : Behavior Intelligence Formation based on Communication between Human and Robots, Proceedings of tutorial on Bayesian Network, 2001.
- Tetsunari Inamura, Yoshihiko Nakamura, Moriaki Shimozaki : Integration of Behavior Recognition and Generation Processes based on Associative Memory, Proc. of the 19th Annual Conference of the Robotics Society of Japan, pp.1237-1238, 2001.
- Iwaki Toshima, Tetsunari Inamura, Yoshihiko Nakamura : Making Motion Primitive by Calculating Correlations of Each Joint and Abstract It with HMM, Proc. of the 19th Annual Conference of the Robotics Society of Japan, pp.409-410, 2001.
- Moriaki Shimozaki, Tetsunari Inamura, Yoshihiko Nakamura : Recognition, Memorization and Generation of Human Motion Pattern by an Associative Memory, Proc. of the JSME Conference on Robotics and Mechatronics, 2P1-B11, 2001.
- Iwaki Toshima, Tetsunari Inamura, Yoshihiko Nakamura : Closing mimesis loop by humanoid embodiment, Proc. of the JSME Conference on Robotics and Mechatronics, 1P1-D11, 2001.
- Tetsunari Inamura, Iwaki Toshima, Hideaki Ezaki, Yoshihiko Nakamura : Generation of whole body motion using mimesis loop and primitive symbols, Proc. of the 18th Annual Conference of the Robotics Society of Japan, pp.801-802, 2000
- Iwaki Toshima, Hideaki Ezaki, Tetsunari Inamura, Yoshihiko Nakamura: Generation of Primitive Symbols using Primitive Self Motinos and Observation of Others' Motions, Proc. of the 18th Annual Conference of the Robotics Society of Japan, pp.803-804, 2000
- Yoshihiko Nakamura, Tetsunari Inamura: Research on Humanoid Robots with Brain-Like Information Processing, Proc. of the 18th Annual Conference of the Robotics Society of Japan, pp. 793-794, 2000.
- March 2003 : Funai Incentive Award of Computer Science
Research on Motion Recognition, Generation and Abstract for Humanoid Robots based on Stochastic Method
- June 2003 : Best paper of the 16th Annual Conference of Japanese Society for Artificial Intelligence
Tetsunari Inamura, Iwaki Toshima, and Yoshihiko Nakamura:
Emergence of Proto-Symbols and Acquisition of Motion Patterns for Humanoids based on Mimesis.
Y.Nakamura, T.Inamura, H.Ezaki, I.Toshima, M.Shimozaki, T.Ishihara, H.Tanie, W.Takano
(Your opinions and questions about Statistic Information Processing that Unifies Recognition and Generation of Motion Patterns are welcome.E-mail at )
)
